Rotations dans un ordre d'axe différent
Bonjour, voici la problématique pour laquelle je sollicite votre aide.
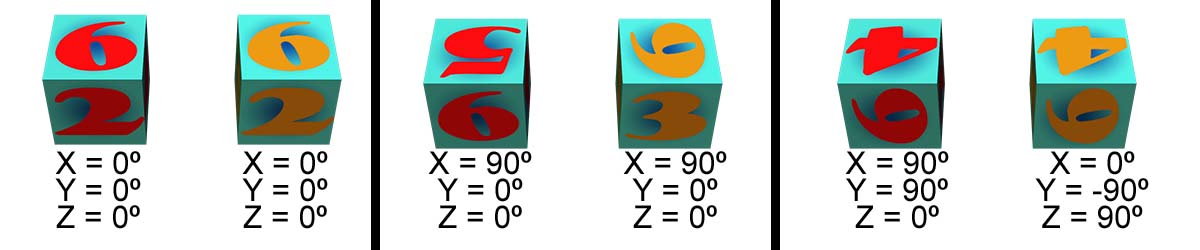
J'ai 2 cubes rigoureusement identiques que je peux mouvoir en rotation selon 3 axes x, y et z orthonormés qui sont identiques pour les deux.
Cependant les rotations du premier cube se font obligatoirement dans l'ordre y, puis x, puis z.
Par exemple A1y, B1x, C1z
et les rotations du second cube obligatoirement dans l'ordre x, puis y, puis z.
Je voudrais connaître la «formule» qui me permettrait, connaissant A1y, B1x, C1z, de déterminer les valeurs A2x, B2y, C2z à appliquer au second cube dans son ordre propre afin qu'il se retrouve dans la même position.
Sans doute de la forme
A2x = f1(A1y, B1x, C1z)
B2y = f2(A1y, B1x, C1z)
C2z = f3(A1y, B1x, C1z)
Bien sûr je trouve les valeurs triviales quand les angles sont de 0º, 90º, 180º, -90º ou -180º mais je sèche sur les valeurs intermédiaires.
Je crains que la solution passe par un calcul matriciel... que je ne domine pas bien. Si une expression linéaire était possible se serait un rêve...
Merci pour votre aide.
-----