


Bonjour,
Je vous présente un problème en espérant que vous ayez des idées car je suis un peu bloqué.
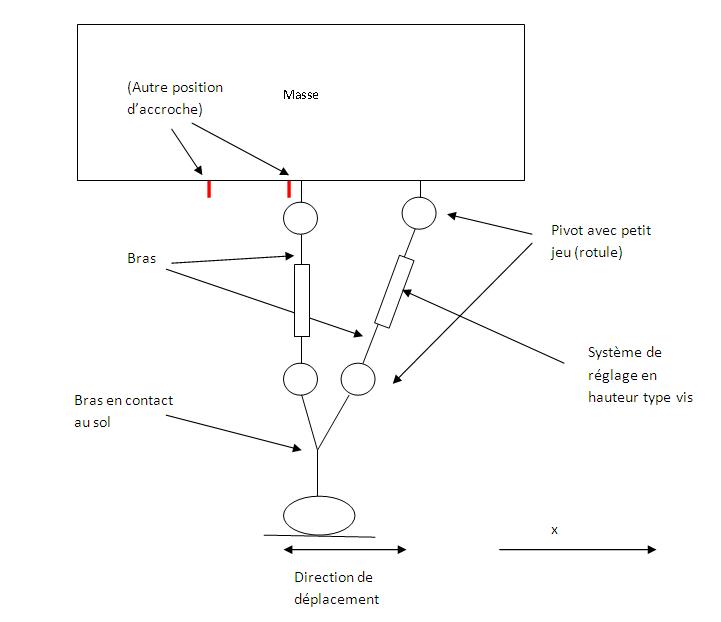
Une masse doit etre guidée en translation sur la sol par des pieds.
Ces pieds doivent être réglables en hauteur et peuvent être accrochés à deux position différentes d'ou les pivots (avec jeu).
Le pied est constitué de 3 barres. 2 barres en pivot et une barre avec une sorte de bille qui glisse au sol. Il y a un pied de part et d'autre de la masse et un 3eme pied pour éviter le basculement (sur le schéma, on ne voit qu'un pied puisqu'on est dans le plan, le 3eme pied n'est pas représenté)
Avec une telle géométrie, mon pied n'est pas stable (propriétés des quadrilatères) car mon pied avec peut tourner autour des points d'attaches sur la masse.
http://www.youtube.com/watch?v=Hpdz88Z35Xs
A noter que les bras seraient fixés a la masse par des goupilles (d'ou liaison pivot ou rotule si jeu). Les bras sont cylindriques (peut être modifié)
Une système triangulaire pourrait stabiliser les deux bras en pivot mais pas le bras au sol pourrait pivoter.
J'aimerais donc des idées de mécanismes simples pour supprimer ces degrés de libertés, genre goupilles.
Merci d'avance
Bon aprem'
-----