Bonjour tous,
je vous écris car en mécanique on manipule souvent des produit de matrices, tenseurs ... mais je ne suis pas certain de toujours bien comprendre les notions qui se cache derrière.
j'écris sur le forum physique car j'aimerai avoir l'avis un physicien (un peu matheux quand même) pour avoir une idée un peu concrete...
(quand j'écris entre crochet ça signifie matrice, le reste c'est des vecteurs)
1°) multiplication matrice/vecteur (où produit contracté)
-----------------------------------------------------------
si je multiplie une matrice par un vecteurje vais avoir un vecteur "image" b qui va se trouver dans une autre base.
=> On peut donc voir A comme une matrice de changement de base (un peu comme en meca avec les matrice de rotation)
2°) multiplication matrice/matrice et generalité
-----------------------------------------------------------
alors ceci j'ai du mal à voir ce que ça donne "avec les mains". Je suis bien concient que l'on en recontre souvant mais par contre je ne sais pas trop
comment me représenter ceci (peut etre qu'il n'y a rien d'ailleurs à ce représenter...?)
=> le seul truc que je vois est que si je fais :
=> plus généralement, peut on voir un produit contracté (produit matriciel) comme une transformation géométrique "rotation+translation" ?
3°) norme dans une autre base ?
-----------------------------------------------------------
maintenant je voudrais avoir votre avis sur cette opération :
=> intuitivement j'aurais tendance à dire que "b" est le carré de la norme du vecteur "x" mais dans l'espace d'arrivé.... ?
néanmoins ça me parait faux car la norme (Euclidienne) d'un vecteur en générale c'est plutôt ceci :
et ici si veut avoir la norme de l'image de x il faudrait plutot faire :
dans le même contexte, j'ai parfois rencontré des expressions dans ce genre :
4°) produit doublement contracté => produit scalaire
-----------------------------------------------------------
maintenant, l'autre soucis que j'ai avec les matrice est lorsqu'on fait un produit doublement contracté :
à partir de deux matrice on obtient un scalaire, j'aurais tendance à voir ici une sorte de produit scalaire mais d'ordre 2.... ?
=> en fait je ne vois pas trop ce que ça donne, le carré d'une norme de matrice ? pourtant d'après mes souvenirs une norme de matrice ne ressemble pas à ceci mais plutôt à la racine du raton spectrale de A...?
=> dans le cas où je fais :
5°) produit tensorielle
-----------------------------------------------------------
Mon dernier soucis est le produit tensoriel
=> par contre, que représente cette matrice ? c'est l'application linéaire qui permet de passer de "x" à "y" ?
dans le cas où l'on fait :
en fait le produit tensorielle ça m'intéresse bien car j'en ai entendu parlé souvant mais sans vraiment comprendre....
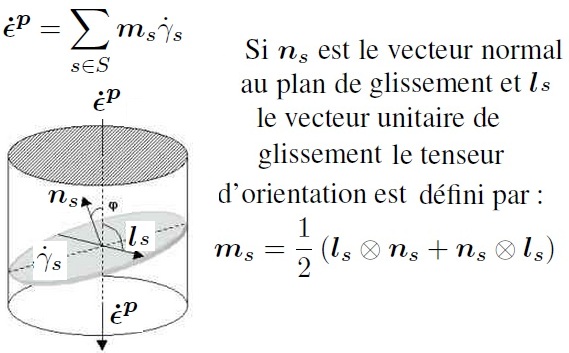
par exemple dans un cube on définissait deux directions "x" et "y" et à partir de ceci on pouvait obtenir une matrice d'orientation valable pour n'importe quelle autre vecteur...
le soucis est que je n'ai pas vraiment compris ces notions et qu'es ce que l'on peut faire avec cette matrice...
Bref,
vous voyez que j'ai pas mal de problèmes... en fait j'ai déjà fait de l'algèbre linéaire (il y a longtemps) mais jamais de l'algèbre bilinéaire.... néanmoins en mécanique
mes prof considéré ces choses comme connue et donc je n'ai jamais vraiment compris vraiment ce que représente ces opérations...
j'espère que vous pourrez m'aider (que ce soit avec les mains ou mathématiquement)
merci beaucoup
-----



 )
)