
Bonjour a tous,
J'aimerai vraiment que vous me donniez les 3 matrices de passage (quand l'axe x des deux reperes sont confondus,de meme pour y et z), tournant avec un angle anti horaire.
merci d'avance
-----

Bonjour a tous,
J'aimerai vraiment que vous me donniez les 3 matrices de passage (quand l'axe x des deux reperes sont confondus,de meme pour y et z), tournant avec un angle anti horaire.
merci d'avance
désolé pour le double post, s'il vous plait j'en ai vraiment besoin, lundi j'ai un exam en mecanique rationnelle et j'arrive toujours pas maitriser les matrices de passage (rotation), on m'a dit qu'elles sont trois et qu'elles ne changent jamais, ça pourrait être un très bon atout dans les exos pour éviter tout problème de projection.
Merci
up svp une réponse !

si vous avez besoin des matrices de rotations vous pouvez taper matrice de rotation sur votre moteur de recherche préféré et vous les trouverez très facilement (wikipédia par exemple).
Sinon, si vous savez ce qu'est une matrice (de manière générale), vous pouvez partir du principe qu'une matrice de rotation n'est rien d'autre qu'un tableau qui explique comment les vecteurs x, y et z se transforment après une rotation d'un angle quelconque:
prenez un papier et un stylo et dessinez un repere x,y z. faites tourner votre repere d'un angle quelconque autour de l'axe x. Cela vous donne un nouveau repère x', y',z'.Regardez comment exprimer les nouveaux axes x',y' et z' en fonction des anciens (par exemple dans votre cas x'=x, faites de meme pour y et z) et c'est fini vous avez votre matrice de rotation dans le cas d'une rotation autour de l'axe x.
j'ai déja cherché et trouvé ça http://fr.wikipedia.org/wiki/Matrice_de_rotation
mais quand j'ai utilisé ces matrices la, je rencontrais des fois des contradictions, je ne trouvais pas les meme resultats, c'est pourquoi je vous ai demandé de me donner ces 3 matrices de passages
et merci pour ta réponse
rebonjour,
svp je viens de trouver ces matrices la Inline13.gif Inline10.gif Inline16.gif
est ce que ces matrices sont vraiment les matrices dont je recherche, c'est a dire, sont elles qui peuvent faire passer un vecteur d'un repére vers un autre, sachant que ce nouveau repére tourne par rapport au dernier avec un angle anti horaire ? Merci
une confirmation svp ?
personne pour confirmer ?
Ben oui, c'est bon.
C'est bien ce que vous avez là :
http://fr.wikipedia.org/wiki/Matrice...imension_trois
Après, il faut faire attention au sens de rotation...
Moi ignare et moi pas comprendre langage avec «hasard», «réalité» et «existe».
justement, si vous voyez de plus prés vous remarquerez que ce que je viens de publier ici est tout a fais le contraire a ce qu'a mis wikipedia c'est pour cela que je vous ai demandé votre aide, alors quelles sont les matrices les plus juste de wikipedia ou bien celles que j'ai trouvé recemment ? sachant que l'angle de rotation est anti horaire.
merci et bonne nuit
Les vôtres sont anti-horaires et celles de Wikipédia horaires.
Elles sont aussi juste l'une que l'autre.
Cordialement.
Moi ignare et moi pas comprendre langage avec «hasard», «réalité» et «existe».
ok merci pour ta réponse.
bonne nuit.
Bonsoir,
Il n'y a pas de mystère : pour comprendre il faut manipuler, ce genre de matrice tu devrais arriver a les retrouver tout seul. Une aide que je trouve précieuse est de trouver un support visuel qui rend moins abstrait les mathématiques, après il y a aussi d'autres moyen comme voir ce que ça donne avec des valeurs remarquables des angles. Si ça peux t'aider -> futura.pdf
Dernière modification par doul11 ; 03/01/2014 à 22h02.
La logique est une méthode systématique darriver en confiance à la mauvaise conclusion.
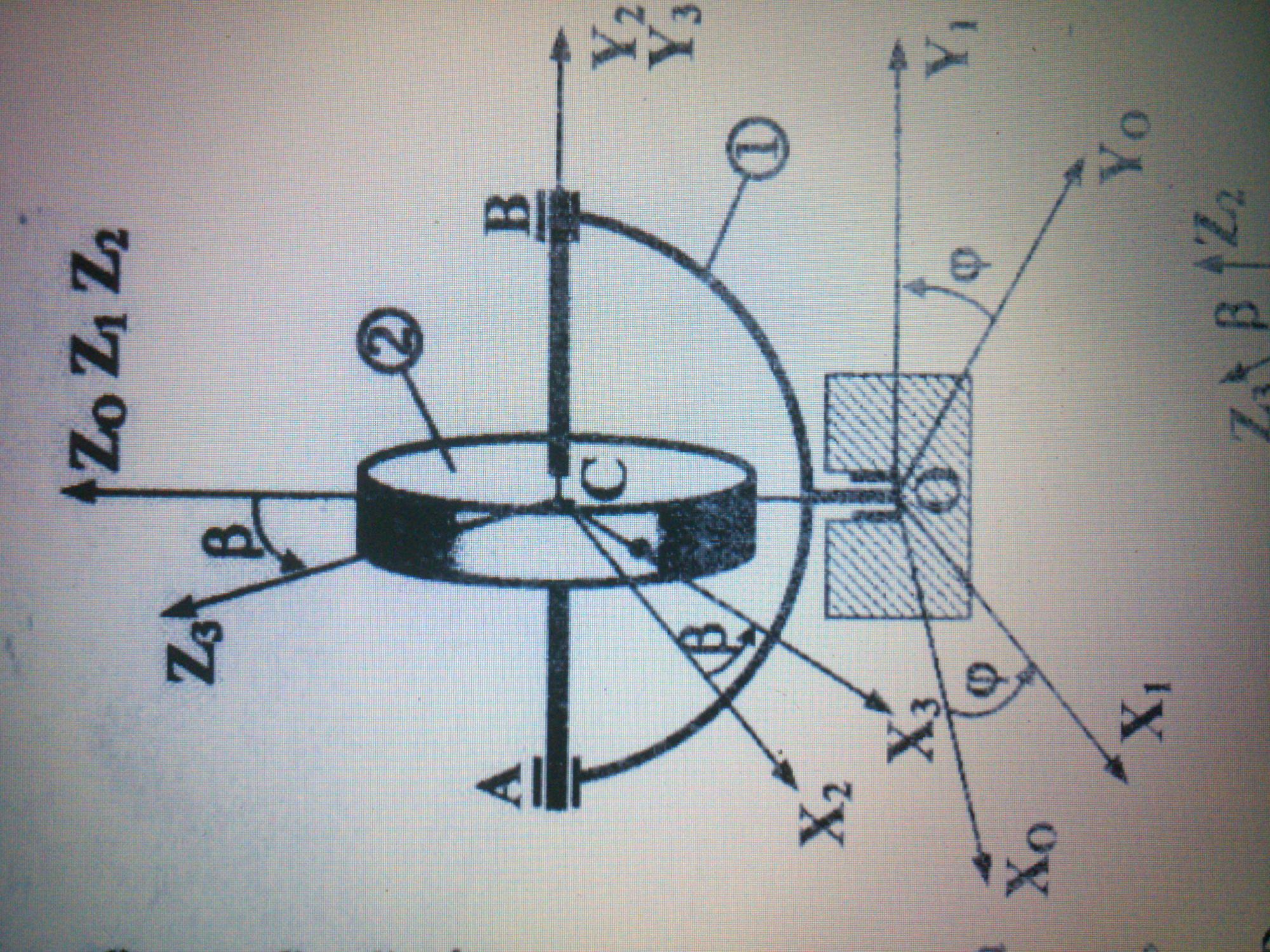
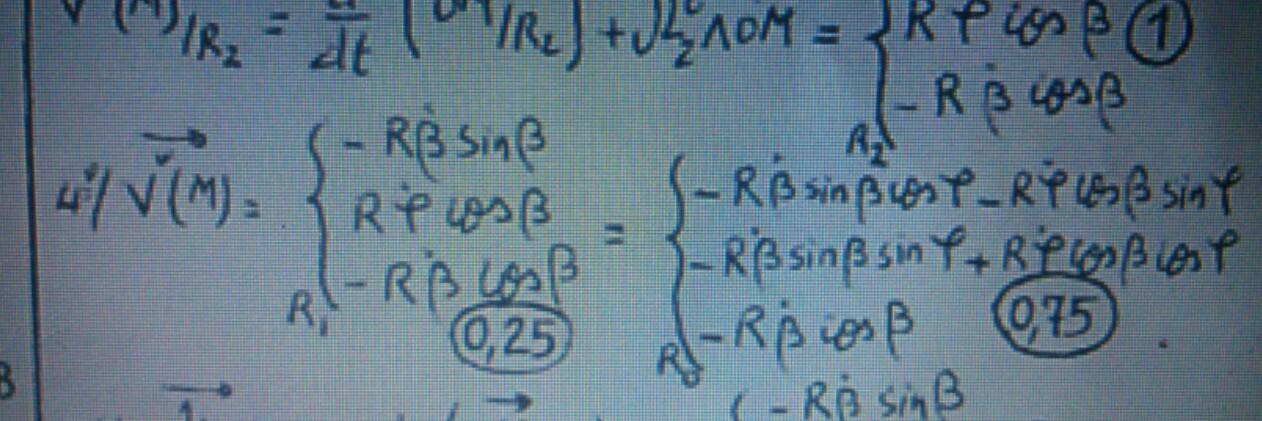
je viens de faire cet exo DSC_0311.jpg , on leur a demandé de trouver la vitesse de M par rapport au repere 0 exprimé dans R1, ils ont trouvé ça IMG_20140103_224913.jpg , donc au début ils ont cherché le vecteur vitesse au repere R0, aprés il faut utiliser une matrice de passage pour aller jusqu'au repére R1, mais en observant le dessin, en allant du repere R0 vers R1 on tourne avec un angle contraire a "psy" ce qui veut dire "-psy", donc on va dans le sens des aiguilles d'une montre, mais quand j'utilise ma matrice de passage (z0 et z1 confondu), je ne trouve pas le meme resultat
merci de me donner un coup car je galére depuis plus d'une semaine avec ça.
je veux juste préciser qu'on va de R1 vers le R0, donc on doit exprimer le veecteur sur le repere R0.
Merci de me répondre
voici le lien sujet au complet avec son corrigé pour ceux qui ont auront besoin.
https://attachment.fbsbx.com/file_do...vCFx-RN302uAIP
un coup de main svp ? merci
désolé d'avoir mis du temps à répondre mais comme stefjm vous l'a indiqué vos matrices de passages sont bonnes de même que celles de wikipédia.
Concernant votre exercice le repère 1 est obtenu par rotation d'angle psi autour de l'axe Z0 du repère 0.
Cela veut donc dire que le repère 0 est obtenu par rotation du repère 1, d'angle (-psi autour de l'axe Z0=Z1)
le passage d'un système de coodonnées à un autre se fait donc à l'aide de votre troisième matrice de passage.
Si vous avez un vecteur V dans R1 il suffit de faire le produit de votre troisième matrice de passage (en remplaçant votre angle gamma par -psi) par V pour avoir votre vecteur dans R0
C'est ce qui a été fait dans votre exercice à la question 4 si vous ne trouvez pas le même résultat vous avez probablement fait une petite erreur de calcul.
Si vous avez un vecteur V0 dans R0 il suffit de faire le produit de votre troisième matrice de passage (en remplaçant votre angle gamma par +psi) par V0 pour avoir votre vecteur dans R0.
merci our ta réponse mais je viens de répondre a la question mais il fallait choisir la troisiéme matrice de wikipedia pas la mienne et mettre -psy pour trouver la réponse, je me retrouve plus avec ces matrices la et demain j'ai un exam a 8h30
je pense que vous devez avoir quelques problèmes avec les produits de matrices. Car pour avoir le résultat demandé il faut ou considérer votre troisième matrice avec un angle (-psi) ou prendre celle de wikipédia avec un angle (+psi).
Bon courage pour vos révisions!
Un lien pour le calcul matriciel:http://fr.wikipedia.org/wiki/Produit...ciel_ordinaire
merci pour ton aide mais je sais faire le produit matriciel, je n'était pas le seul a avoir calculer ça meme pote l'a calculer on était obligé d'utiliser la matrice de wikipedia et mettre -psy
juste une question
est ce que les deux axes confondu ne doivent pas etre sortants quand on applique la matrice de passage ?
Je crains hélas que vous ne vous soyez trompé tous les deux: on reprend pas à pas:
je détaille ma démarche:
on a à faire le produit de la matrice dans le cas général d'un angle gamma quelconque
par le vecteur
d'après les règles du produit matriciel (voir par exemple le lien wikipédia) on aura pour la ligne 1:
dans votre cas de figure l'angle de rotation gamma de R1 vers R0 vaut -phi. On retrouve l’expression demandée (cos (-phi)=cos (phi) et sin (-phi)=-sin (phi)) idem pour les lignes 2 et 3
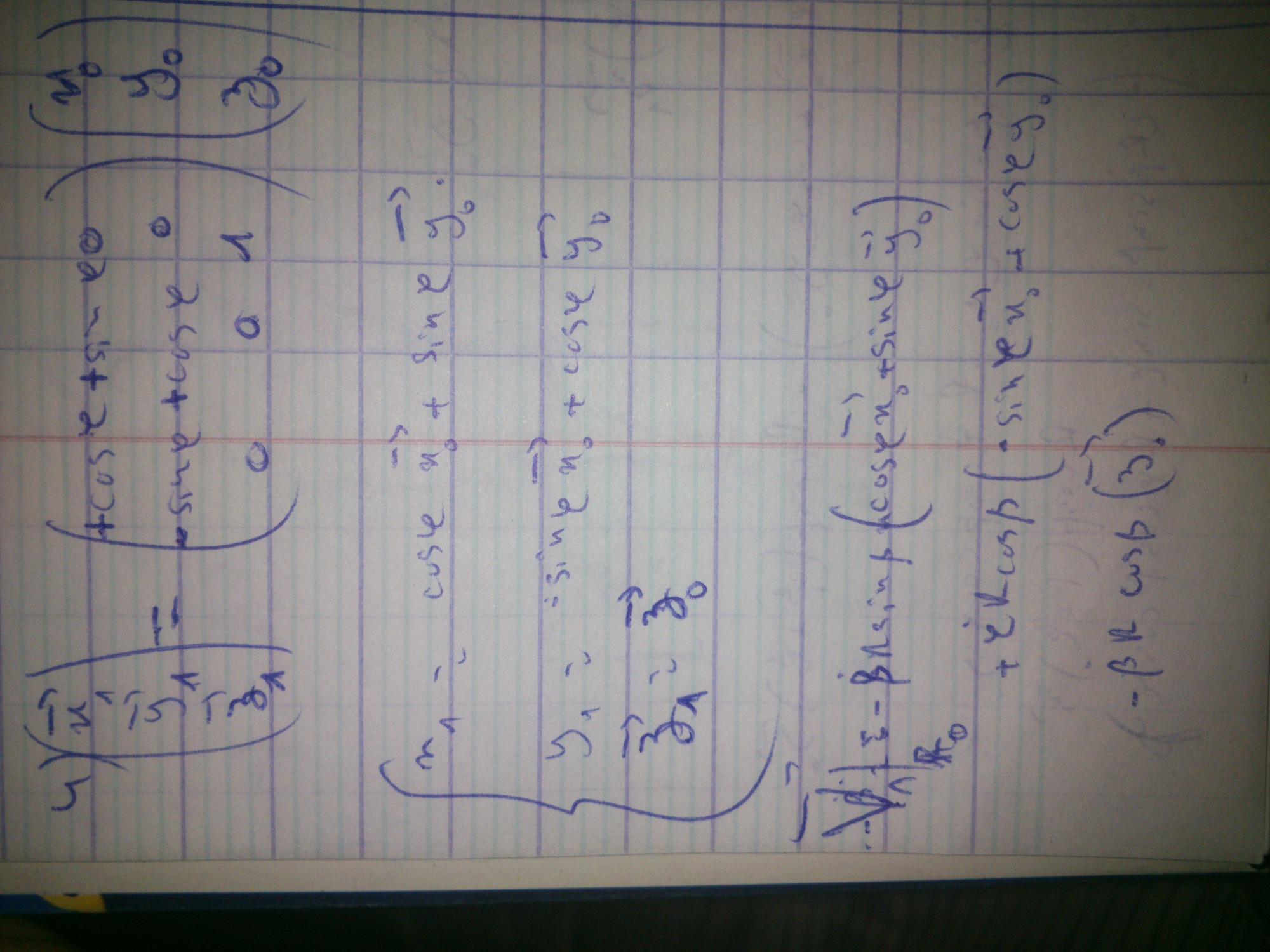
voila ce que j'ai fais DSC_0313.jpg DSC_0314.jpg
est ce que vous pourriez juste svp répondre a ma derniere question ?
pour faire une matrice de passages il faut d'abord dessiner les axes en 2 dimension pour faciliter, mais n'est on pas obligé de dessiner la vue ou les deux axes confondus sont sortants ? je ne sais pas si vous m'avez compris.
je dois dire que je ne vois pas vraiment ce que vous voulez dire. Il me semble cependant qu'il faut en effet que votre repère soit orienté correctement (repere orthonormé direct) si c'est ce que vous voulez dire.
reprenez mon message précédent il me semble que celui-ci est clair
Les matrices de base[modifier | modifier le code]
Dans un espace euclidien à 3 dimensions, les matrices de rotations suivantes correspondent à des rotations autour des axes x, y et z (respectivement) :
les trois matrices 3x3 présentes sur ce lien http://fr.wikipedia.org/wiki/Matrice_de_rotation
Les rotations opèrent ainsi : Rx tourne l'axe y vers l'axe z, Ry tourne l'axe z vers l'axe x et Rz tourne l'axe x vers l'axe y. Voir aussi la section #Dimensions emboîtées.
Dans un espace orienté[modifier | modifier le code]
Si l'on oriente l'espace en trois dimensions avec les conventions habituelles (x vers l'avant, y vers la droite et z vers le haut), ces rotations se font dans le sens contraire aux aiguilles d'une montre lorsque le troisième axe (celui qui ne subit pas la rotation) est dirigé vers l'observateur. En pratique, pour déterminer le sens de rotation, on peut utiliser la règle de la main droite.
voila ce que je voulais dire, donc ces matrices la de wiki sont valables quand l'angle tourne avec un angle anti horaire et l'axe confondu est sortant ce qui veut dire dirigé vers l'observateur non ?
oui c'est bien cela!
je crois savoir d'où vient votre erreur vous avez chercher à exprimer les coordonées dans R1 en fonction de celles de R0 pour ensuite revenir à celles de R0 (puisque votre vecteur vitesse était dans la base R1). C'est long, fastidieux et est l'occasion de faire beaucoup d'erreur de calculs.
Je vous conseillerais personnellement la méthode que je vous ai expliqué dans le post #18 et expliciter dans le post #23 à savoir:
vous avez vos matrices de rotation (celles que vous avez trouvées) et vous savez quand utiliser quelle matrice (en fonction de l'axe de rotation).
Vous savez également que vos matrices sont obtenues pour un angle anti-horaire.
A partir de là les deux post vous permettent de répondre à votre question 4 ainsi qu'à toutes les questions du même genre qui vous seront posées. Reprenez les calculs avec cette méthode, prenez votre temps pour la comprendre et vous verrez que vous arriverez sans mal au résultat qu'il faut.
je détaille un peu le choix de l'angle (pourquoi -psi et pas +psi)
Vous avez votre vecteur vitesse dans la base R1. Le passage de la base R1 vers la base R0 se fait par rotation d'un angle psi dans la sens HORAIRE. (car le passage de R0 à R1 se fait par rotation d'un angle +psi dans le sens anti-horaire).Ou encore d'un angle -psi dans le sens anti-horaire. Puisque vos matrices de passage sont pour des angles dans le sens anti-horaire il vous faut prendre l'angle -psi
je commence à maitriser un peu les matrices grace a vous, merci beaucoup pour votre aide
j'espere avoir pu vous aider bon courage c'est juste une méthode à comprendre. Peu intuitive au début certes, mais une fois que vous aurez compris ca ira tout seul je vous le garanti.
Bon courage pour vos révisions.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}