


Salut à tous !
J'ai un projet de dynamique à faire, je ne sais pas trop où poster le sujet, je poste ici.
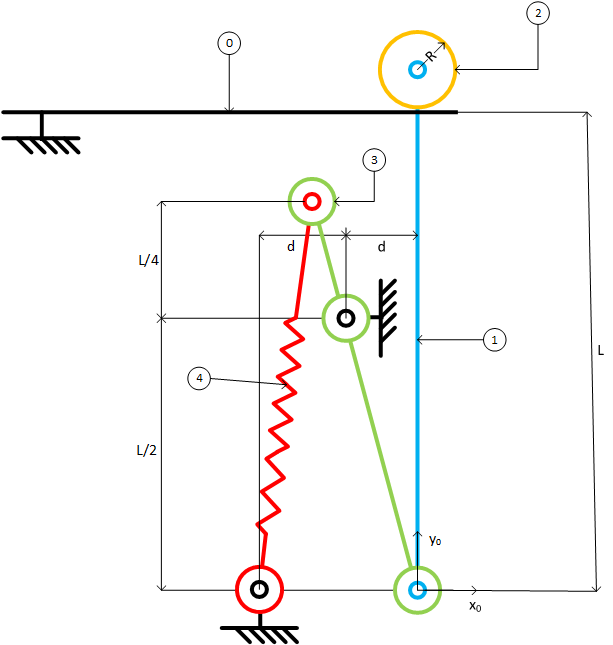
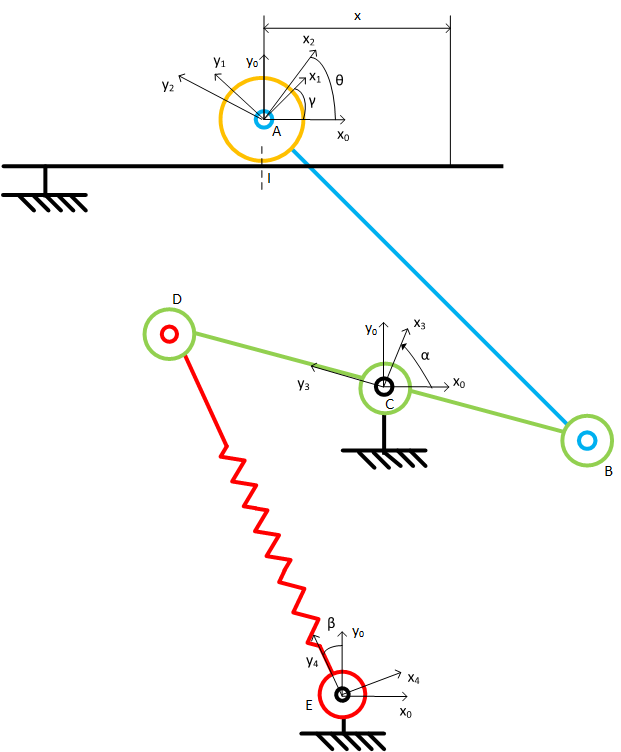
Nous sommes deux élèves en 1ère année de cursus ingénieur mécanique, et nous avons à choisir, modéliser et analyser analytiquement un système composé de 3 ou 4 solides. Nous avons voulu étudier une porte de garage (cf schéma cinématique ci-dessous).
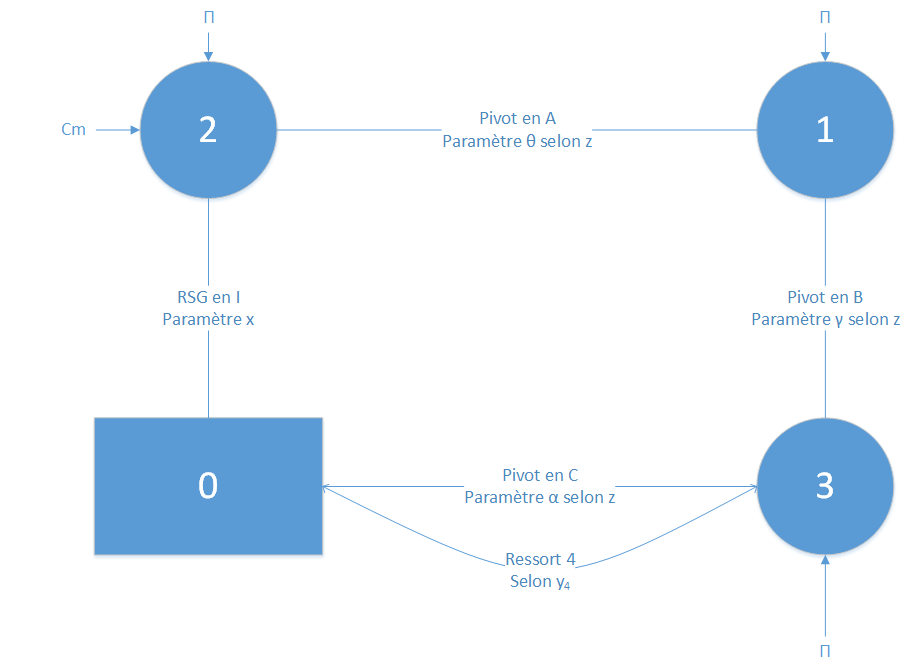
Schéma cinématique Porte garage 1 avec données.png Schéma cinématique Porte garage 2 avec données.png Graphe des liaisons Porte de Garage.png
Le système est assez simplifié et se constitue de 3 solides. Une roue (2) est en roulement sans glissement sur le rail fixé au bâti (paramètre x) et est en liaison pivot (paramètre theta) avec la porte (1). La porte (1) est paramétrée par rapport au bâti selon l'angle gamma, et est en liaison pivot avec la barre (3), elle même en liaison pivot avec le bâti (paramètre alpha). Un ressort agit sur (3) en D, selon un angle beta.
On a vraiment beaucoup de mal à trouver les équations de Lagrange. On cherche à déterminer l'effort exercé par la roue sur le rail, on a donc ajouté un paramètre y selon y0 afin de "casser" la liaison RSG. Nous avons considéré que le ressort était extérieur au système, mais en faisant cela on trouve des coefficients énergétiques pour theta, y, gamma et alpha, mais on a une partie 1/2k(l-l0)² (puissance du ressort) qui ne correspond à aucun coefficient énergétique. Est-ce normal ?
Doit-on plutôt considérer le ressort comme faisant partie du système, et ajouter deux paramètres beta et l (longueur du ressort) dans nos équations ?
On a essayé d'exprimer beta en fonction des autres paramètres, mais on ne trouve pas d'équation simple, ce qui semble étrange vu la simplicité apparente du système. De même pour l.
Merci d'avance pour votre réponse
{kind=link}
{kind=link}
{kind=link}
-----