Bonjour,
Une petite question concernant une liaison linéaire rectiligne établie entre 2 cylindres.
On dit que 2 cylindres en appui au niveau d'une de leur génératrice sont en liaison linéaire rectiligne (LR pour faire simple).
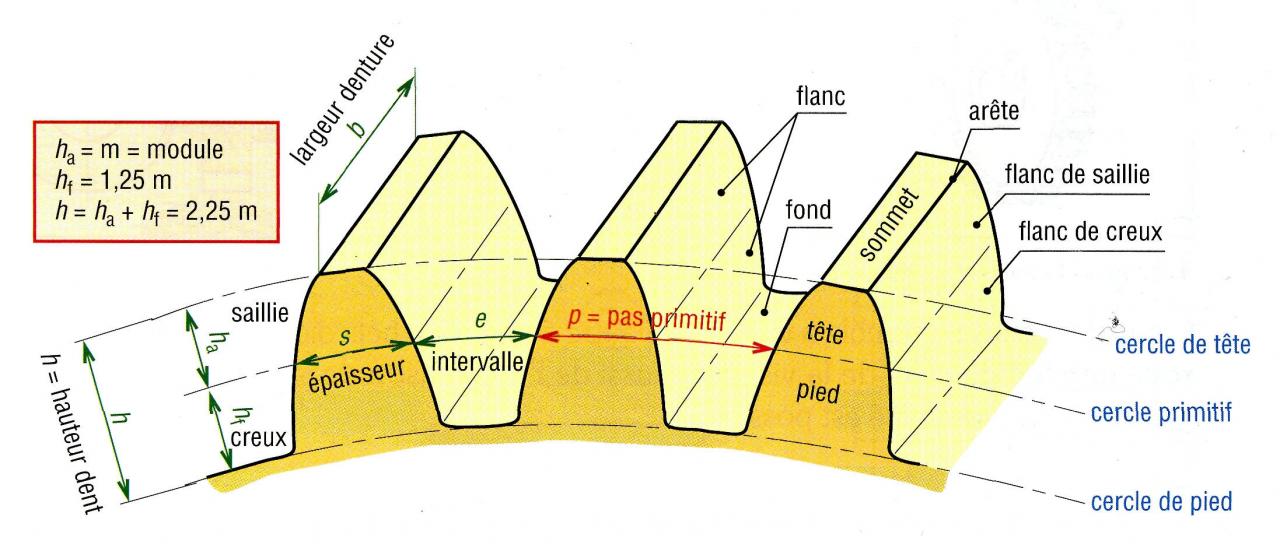
L'illustration est celui des engrenages même si les profils en contact ne sont pas véritablement cylindriques mais des profils en développante de cercle...Passons...
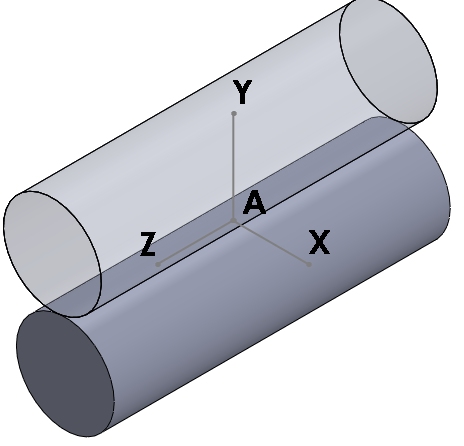
Prenons l'exemple d'une LR de centre A, de ligne de contact selon (A,Z) et de normale (A,Y) => Voir illustration ci-jointe...
Cette liaison normalisée doit avoir 4 degrés de liberté qui sont donc les mouvements relatifs dans le repère local de la liaison tout en conservant ce contact linéique.
Je comprends très bien les degrés de liberté non autorisés par la liaison suivants:
- Translation selon (A,Y) qui supprimerait totalement le contact LR
- Rotation autour de (A,X) qui supprimerait le contact linéique au profit d'un contact ponctuel...
Je comprends également très bien les degrés de liberté suivants:
- les 2 translations dans le plan tangent du contact, soit selon (A,Z) et selon (A,X)
- la rotation autour de (A,Z)
Mais je coince sur la rotation autour de (A,Y) car une telle rotation supprimerait le contact linéique au profit d'un contact ponctuel...
Les axes de cylindres n'étant plus parallèles, le contact ne peut plus être linéique.
Dans le cas d'une LR entre un cylindre et un plan, il n'y a pas ce problème mais là, entre 2 cylindres, je tique...
Quelqu'un peut-il me convaincre que cette rotation est possible avec un tel contact et que la liaison entre 2 cylindres peut donc effectivement se modéliser par une liaison normalisée de type LR ?? avec les 4 degres de liberté que cela implique ??
Merci d'avance a ceux qui se pencheront sur ce petit problème...

-----