

Bonjour, dans le cadre de la réalisation d'un dossier de conception d'un robot 6 axes je cherche en ce moment à calculer les couples des actionneurs de chaque axe.
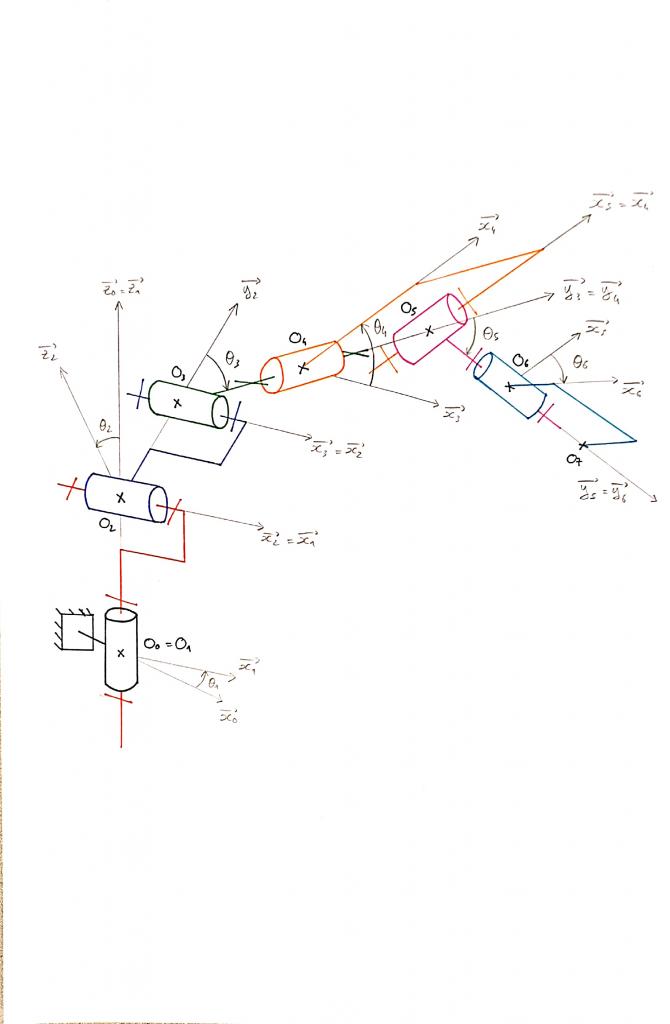
J'ai réalisé le schéma cinématique du robot :
J'avoue ne pas savoir par où partir pour la suite.
Pour des raisons de simplicité de modélisation je considère que chaque bras du robot est un cylindre de longueur Li et de rayon Ri.
Je suppose que pour déterminer les couples à appliquer aux arbres pour les faire pivoter il va me falloir réaliser une étude dynamique de l'ensemble du robot. Je sais faire ces calculs (torseurs cinématiques/cinétiques/dynamiques, énergie cinétique etc...) mais avant de me lancer dans des calculs très longs (6 angles de rotation) je souhaiterais en connaitre la finalité et savoir ce que je cherche à calculer exactement.
J'espère que vous saurez me mettre les pieds à l'étrier
-----

