

Bonjour à tous.
Je vous expose la situation:
>>>
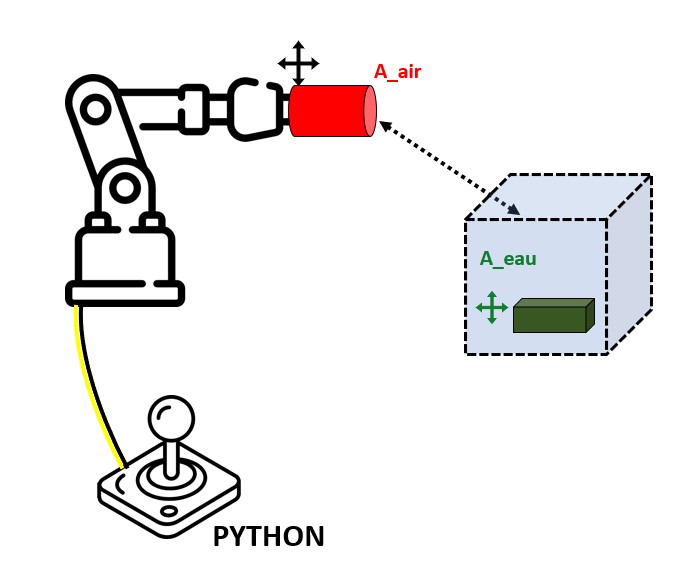
A l'aide d'un robot collaboratif, nous cherchons à déplacer un petit aimant (nommons le A_eau) contenu dans un support plastique disposé dans l'eau avec un plus gros aimant (A_air).
paramètres aimants :
A_air = cylindre de diamètre 70mm et de hauteur 70 mm // poids de 2kg, néodyme N45
A_eau = parallélépipède de dimensions 30mm x 10mm x 5mm // poids de 11g, néodyme N42
Un petit schéma de notre projet
<<<
J'ai déterminé le champs magnétique, le champs de force puis le gradient de mon aimant A_air , théoriquement via Matlab puis expérimentalement à l'aide d'une sonde de Hall. (Merci le forum!!).
Mes résultats matchent, je suis content.
Nous arrivons à déplacer A_eau à l'aide de A_air lorsqu'ils sont à la bonne distance (env. 16cm). Càd que nous pouvons faire suivre la trajectoire de A_air à A_eau, sur une surface plate comme une table ou dans l'eau et SANS emballement des aimants.
Comme expliqué, le déplacement de l'aimant A_air se fait à l'aide d'un robot collaboratif constitué de plusieurs axes. L'aimant est contenu dans un socle plastique imprimé en 3D et fait office d'organe terminal.
L'interface du robot collaboratif nous renseigne des coordonnées X, Y, Z qui correspondent aux positions linéaire du robot dans les directions X, Y et Z. On a également les coordonnées W, P, K qui correspondent à l'orientation angulaire du robot (rotations autour des axes X, Y, Z).
Ma question : comment mettre en lien mon gradient avec ces coordonnées ? Désolé si la question semble flou, mais on attend de nous de pouvoir faire ce rapprochement, au sens ou si on veut déplacer A_eau vers certaines coordonnées, le gradient est "censé" nous aider à déterminer les coordonnées auxquels on doit placer l'organe terminal. Il se peut que ma demande ne fasse pas sens, il y a parfois quelque soucis de compréhension avec mon prof..
En vous remerciant !!
-----
