

Bonjour,
Ma question est très basique pour vous. Désolé par avance. Pour moi, c'est tout nouveau alors...
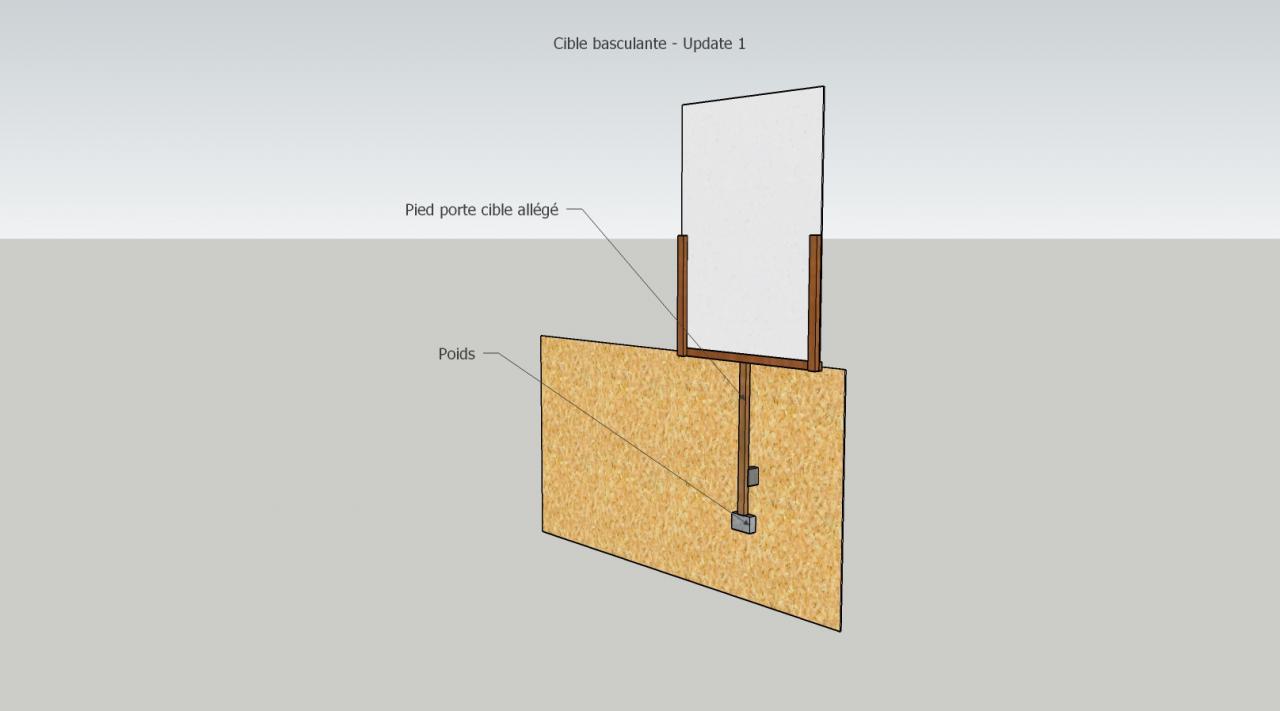
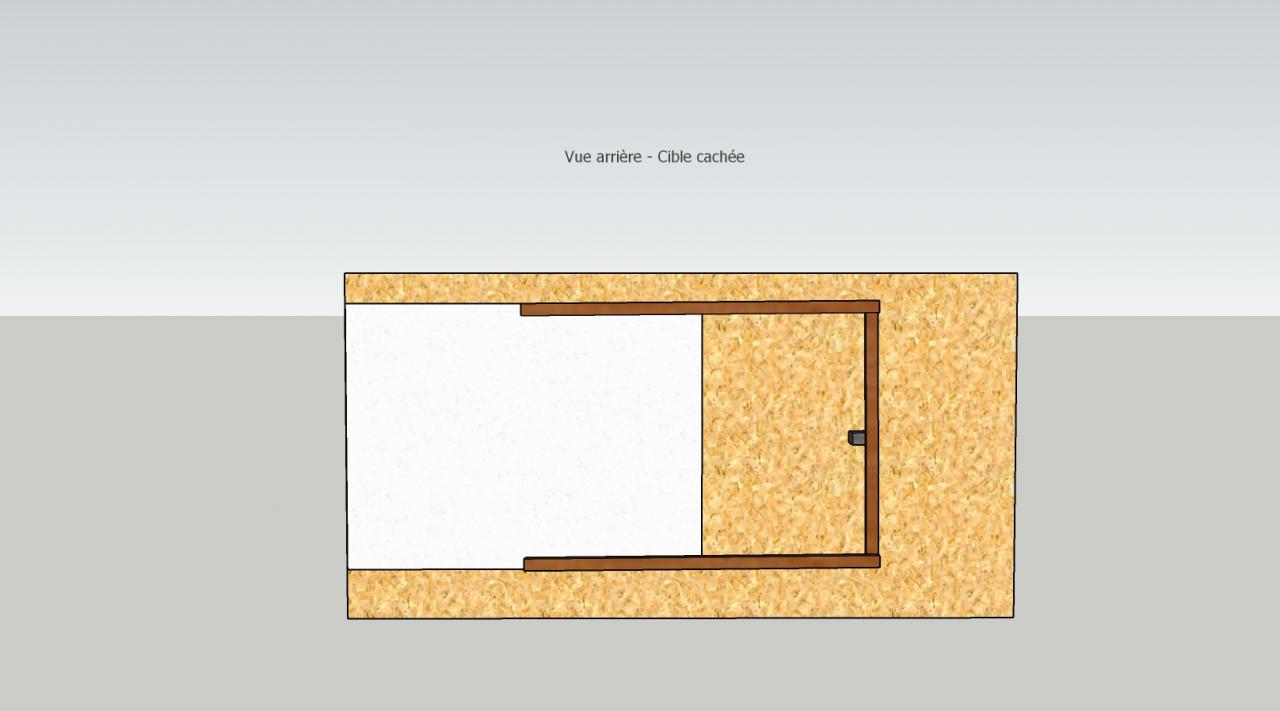
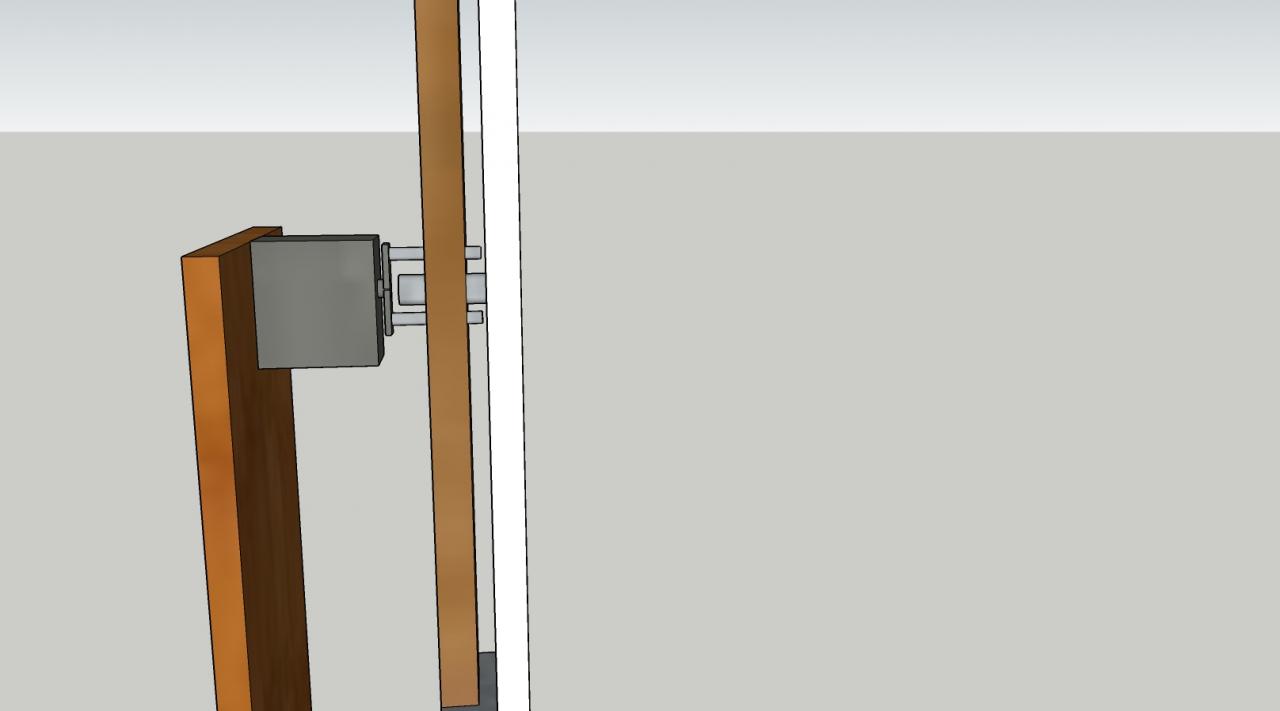
J'aimerais accrocher une cible après un porte cible fabriqué à l'aide de tasseaux, le tout fixé sur un servomoteur commandé par un arduino. Le servomoteur cachera/montrera la cible depuis un occultant.
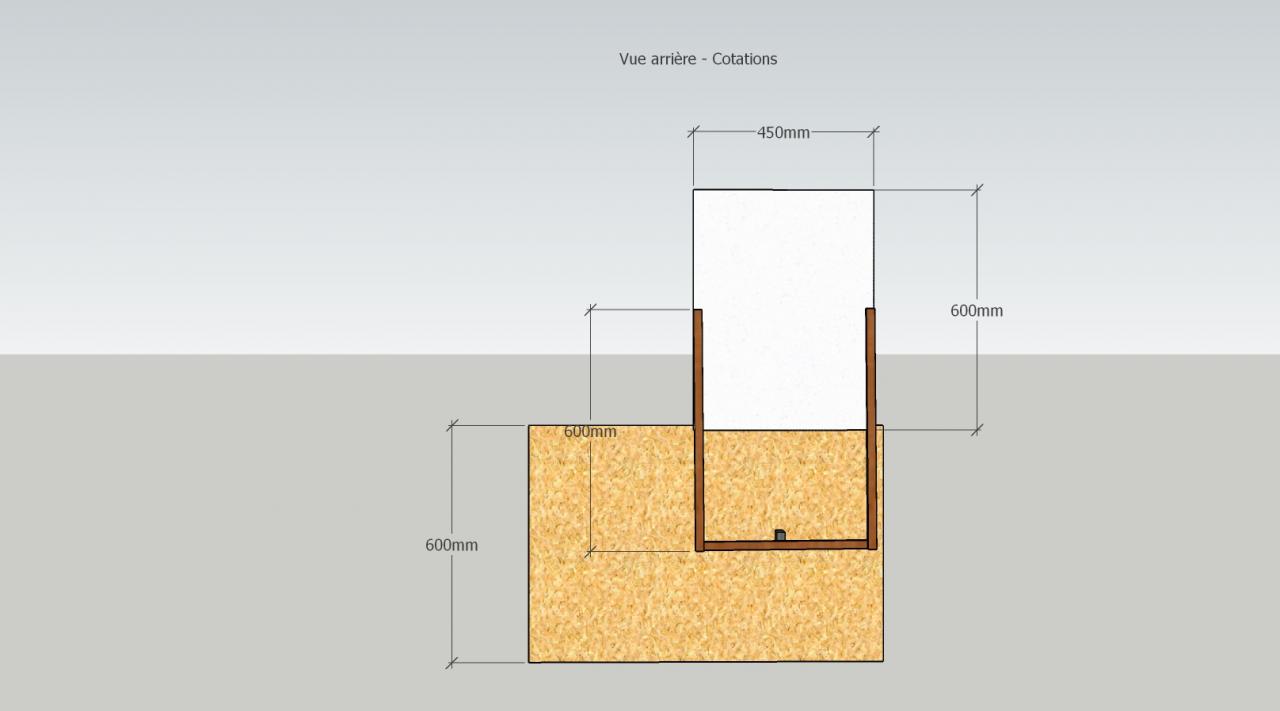
Mon porte cible forme un U. 120cm de hauteur, 45cm de largeur. Le servomoteur sera fixé au milieu du tasseau de 45 cm.
Après un rapide calcul, le porte-cible en entier pèse 297g.
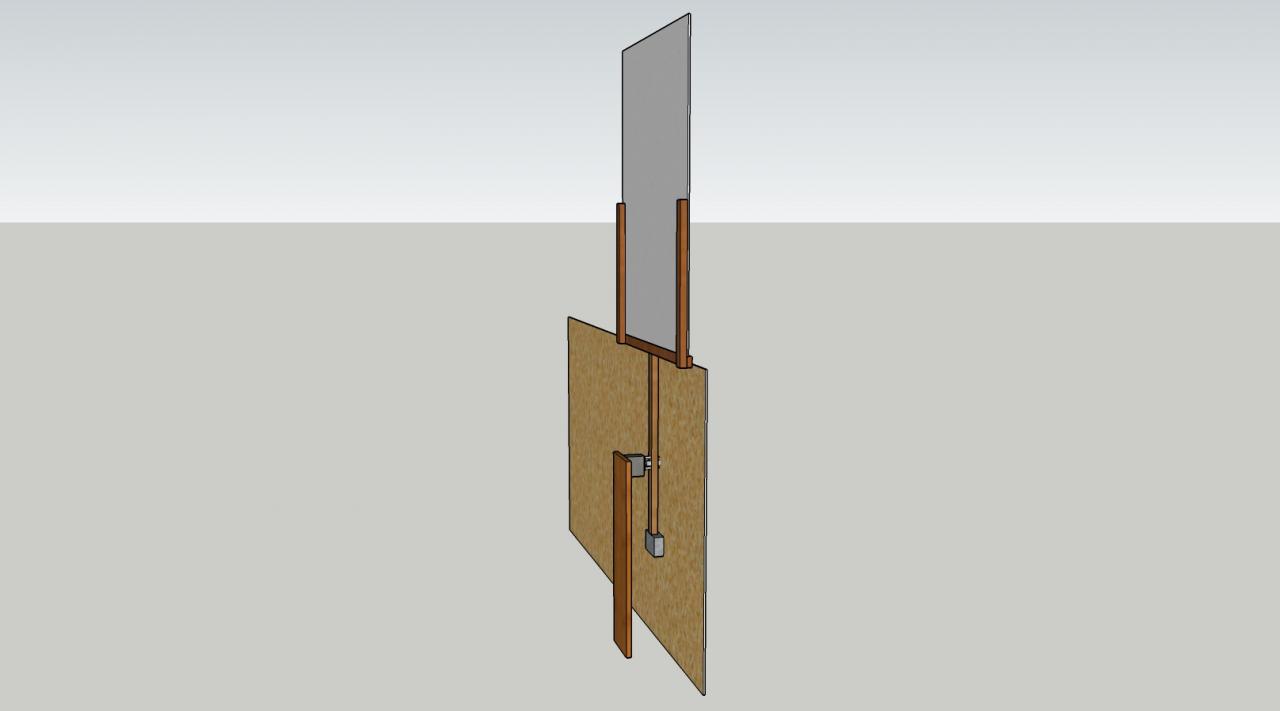
Maintenant j'essaye de trouver un servomoteur qui me permettrait de bouger / maintenir cette cible. Ne sachant pas encore dans quel sens je vais manuvrer, je pense prendre la pire des situations en terme de bras de levier : possibilité de maintenir la cible parallèlement au sol et de la bouger ensuite.
Je regarde les caractéristiques des servomoteurs. Par exemple un de la liste et qui pourrait mintéresser : 9,0 kg.cm en couple.
Et là... Je ne sais pas comment savoir si il est compatible avec mon projet. Je pense que je saurais le faire si mes 297g était tous à 120cm ce qui n'est pas le cas. Mais là je ne sais pas.
Enfin, j'ai lu que les valeurs affichées par les fabricants sont pour le maintien ! Pour connaitre sa capacité à provoquer le mouvement tu dois diviser cette valeur par 2. Est-ce vrai ? Donc ce servomoteur pourrait bouger pas plus de 4,5kg a 1 cm du moteur ?
Merci pour ceux qui prendront le temps de m'instruire. Bonne journée
-----



 )
){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}