

Bonjour à tous,
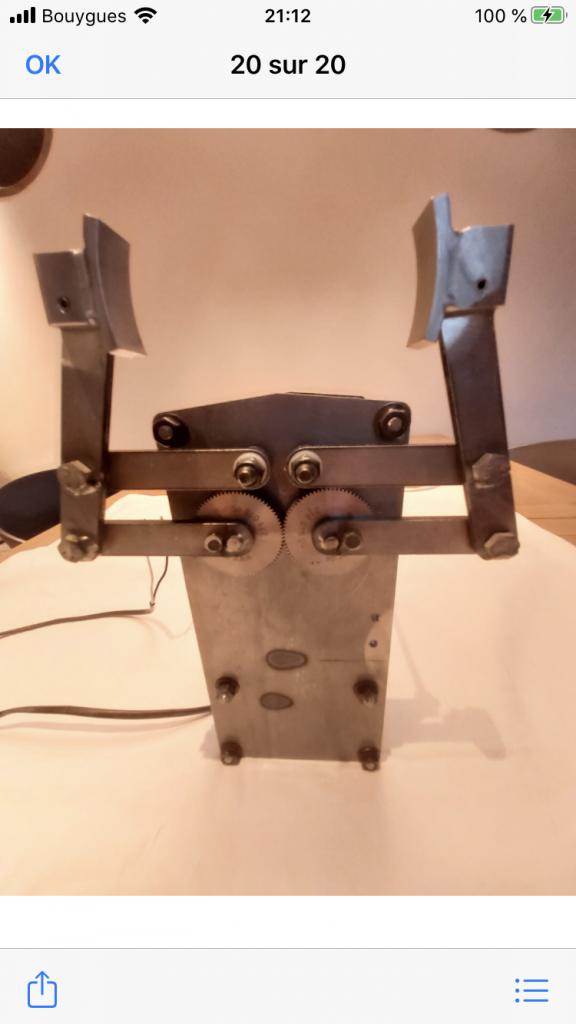
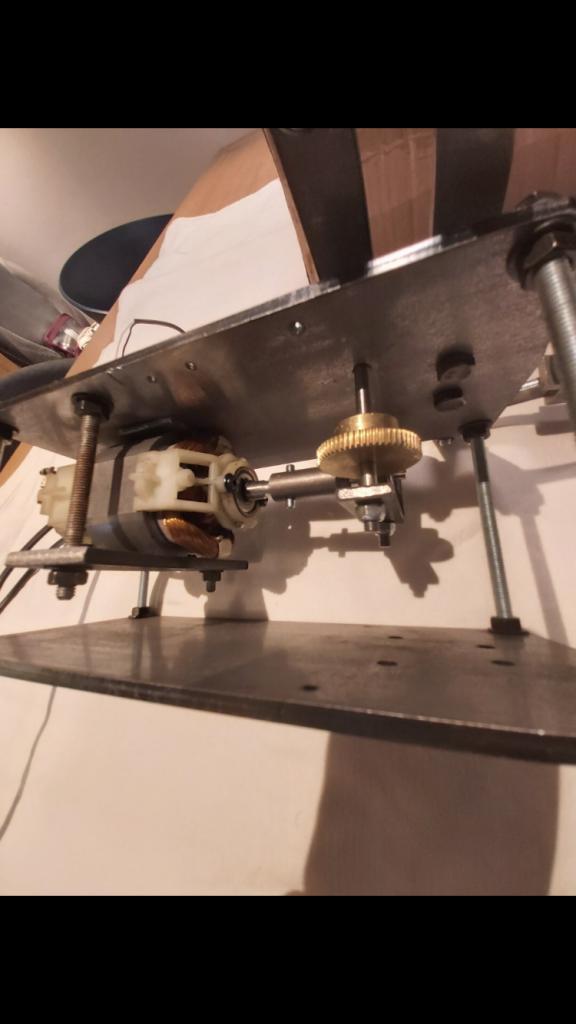
Cela fait maintenant 2 mois que je cherche un mode opératoire pour asservir mon MCC en intensité pour un projet de préhension d'objets fragiles mais je trouve peu de choses à ce sujet ou du moins, des choses peu développées. L'objectif principal est donc de contrôler l'effort en bout de pince qui sera appliqué sur l'objet fragile (par exemple un oeuf). Ma vision de l'asservissement du dispositif serait d'approcher la position de l'objet fragile jusqu'à un certain seuil, détecté grâce à un capteur de proximité, à partir duquel on impose un régime de vitesse très lent jusqu'à contact. A partir du contact, entrerait en jeu ce fameux asservissement en courant/couple pour assurer la préhension sans casse. Je viens donc vers vous pour tenter de recueillir des pistes de recherche quant à cet objectif. Je vous fourni en pièce jointe des photos de mon dispositif.
Merci d'avance,
Bonne soirée.
-----


{kind=link}
{kind=link}