


Bonjour à tous et merci davance à ceux qui voudront bien maider
Jai passé beaucoup de temps sur les questions et écumé le web bien au-delà du raisonnable avant de poster ces questions :
Premier problème, exposé longuement pour vous donner tout ce quil faut :
Sur un optocoupleur classique : une roue dentée fixée sur laxe du moteur pas à pas et DEL + 2 phototransistors
Capteur roue dentée.JPG
Capteur schéma electriq.JPG
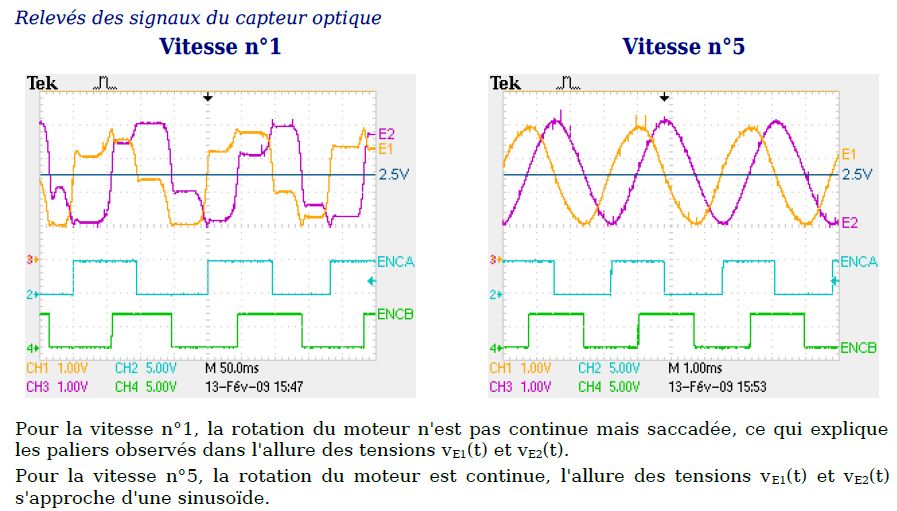
relevé vitesse 1 et 5.JPG
« Le moteur étant en marche, étudier et expliquer l'influence de l'intensité de iLED3 sur l'allure des signaux E1 et ENCA lorsque l'on fait varier le courant dans la LED. »
Puis :
« Régler le courant dans LED3 afin d'avoir un rapport cyclique d'environ 50% pour ENCA. »
Comment peut-on avoir un rapport cyclique différent de 50% ? Compte tenu de la forme des dents de la roue et des emplacements relatifs des 2 phototransistors et de la LED (une seule), la lumière est obturée puis « passante » pendant des intervalles de temps égaux, puisque les trous ont même largeur que les dents. Donc le faisceau vu par le transistor croit puis décroît, on na pas encore du tout ou rien, létage suivant fera la mise en forme avant le PIC.
1) Donc, si I trop faible, lumière trop faible, temps de blocage et de saturation inégaux ?
2) Donc impossible davoir un rapport cyclique >50% ?
3) Pourquoi une sinusoïde, et pas une sortie à 0 pendant une demi-période ? Est-ce dû à une très grande largeur du faisceau qui ferait que lobscurité nest jamais totale ? (transistor : SFH 3163F ; LED : SFH 4113)
Les autres questions du chapitre ne mont pas aidé, merci davance pour votre aide
Lénoncé est visible là :
stielec.ac-aix-marseille.fr/electron/themes/bac/2012/controleur_moteur_contrat.zip
stielec.ac-aix-marseille.fr/electron/themes/bac/2012/dossier_technique.zip
Adresse de la page de tous les liens pour tous les documents :
http://stielec.ac-aix-marseille.fr/e...ectronique.htm
Un peu long, mais je crois qu'il il y a tout.
Merci davance
-----

 moi réfléchir bcp, mais dur-dur!!)
moi réfléchir bcp, mais dur-dur!!)

 ):
):

 : cest une attitude assez centriste, donc !!! En effet
: cest une attitude assez centriste, donc !!! En effet
 et à Qristof
et à Qristof{kind=link}
{kind=link}
{kind=link}