Bonjour,
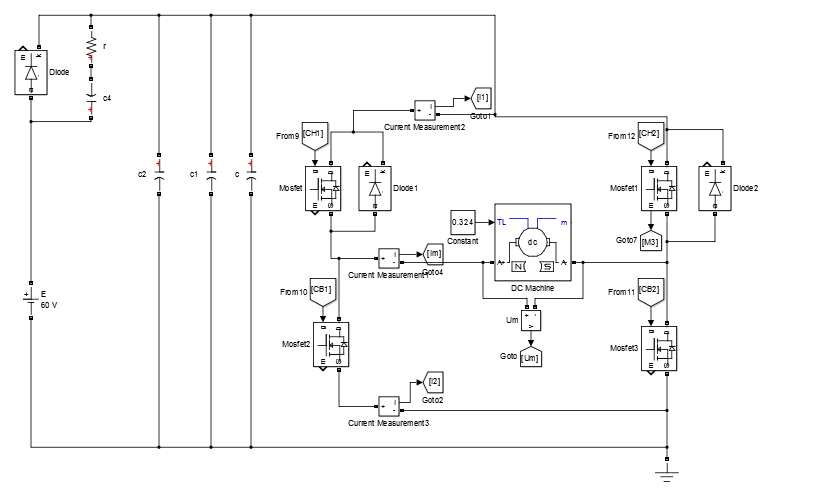
Je réalise actuellement une régulation cascade (vitesse(fem), courant) d'un moteur DC. La PWM est générée par un microcontrôleur et attaque un pont en H à base de MOSFET et de diode de roue libre.
J'ai une consigne de vitesse avec une phase d'accélération (1), une phase constante (2) et une phase de décélération. Durant la phase 1 et 2, je commande le transistor en haut a gauche en tout ou rien (à 1) et mon transistor en bas à droite avec la PWM (les deux autres transistors sont bloqués), ainsi ma tension moyenne au borne du moteur est "alpha*Ubatterie" (alpha étant le rapport cyclique), donc ma sortie PWM du micro est "alpha".
Durant la phase de freinage, je commande en PWM les transistors en bas à gauche et à en bas à droite (phase de roue libre) (les deux autres sont bloqués) . Mon moteur étant générateur, le modèle électrique change donc ma question est "Quelle PWM, je dois appliquer sur ces transistors ? J'aimerais savoir quelle est la tension moyenne au borne du moteur en fonction du rapport cyclique "alpha".
Merci par avance
-----