

Bonjour,
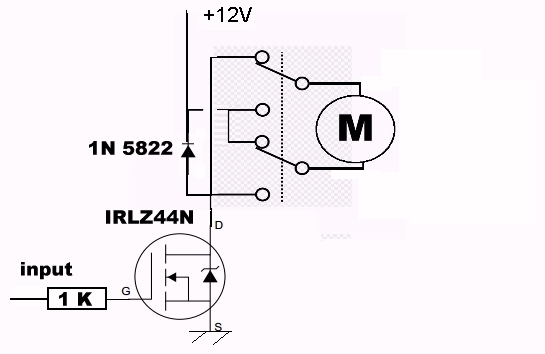
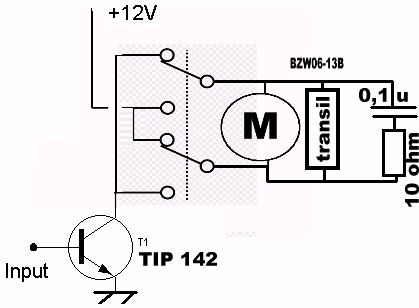
la transil comme protection contre les surtensions générées par un moteur, c'est pas l'idéal lorsque le moteur est piloté en PWM : la puissance dissipée dans la diode est alors égale à Vf*Imoteur*(1-dc) (dc le rapport cyclique). C'est beaucoup d'un point de vue rendement, et potentiellement également refroidissement et pour le composant en lui-même, spécifié pour moins de 2W (en continu).
Le TIP42, un composant lent, n'est pas l'idéal pour un PWM (même si le montage en collecteur commun aide). Un darlington monté en collecteur commun, c'est pas l'idéal (drop-out >1,4V). Un NPN en collecteur commun commutant du 12V demande une commande en 0/12V, ce qui implique l'usage d'un étage de commande du TIP42...
Pas besoin de résistance de base en montage collecteur commun (au contraire : ca accroît le drop-out et ralenti le circuit).
Un petit NMOS logic semble bien plus indiqué.

-----


 Sans connaitre le courant demandé par le moteur... difficile de se prononcer.
Sans connaitre le courant demandé par le moteur... difficile de se prononcer.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}