
Répondre à la discussion

Affichage des résultats 31 à 48 sur 48
Servomoteur + moteur continu = parasites?
- 20/03/2015, 13h53 #31invitef611573a

Re : Servomoteur + moteur continu = parasites?
------
- 20/03/2015, 14h09 #32Antoane
Responsable technique
Re : Servomoteur + moteur continu = parasites?
Bonjour,
Si tu veux vraiment être rigoureux, il faut définir ce que tu appelles 5V : le Voh=5V d'un 4011 n'est pas le même que le Voh d'un 7404... Envoyé par antek
Envoyé par antek 
Je n'ai pas écrit qu'appliquer une commande en 0/3.3V à un servo alimenté en 5V soit recommandable.L'absence d'info sur la tension de commande ne veut pas dire qu'elle peut être n'importe quoi ! Pourquoi pas 1 V ?
J'ai écrit que dire qu'il faut une commande en 0/5V si le servo est alimenté en 5V est une sur-interprétation de la "datasheet".
Personne ici ne nie le fait qu'il est certain qu'envoyer une commande en 0/5V permettra de faire correctement fonctionner le servo. Ce qui est en revanche indéniable, c'est qu'une commande en 0/3.3V peut convenir.
Ex. : Si le CI d'entrée du servo est un 74HCT14 (Schmitt trigger inverter http://www.nxp.com/documents/data_sheet/74HC_HCT14.pdf) ou autre composant présentant des niveaux similaires, il sera compatible avec la sortie GPIO 0/3.3V d'un ARM1176JZF (http://infocenter.arm.com/help/topic...1176jzf_ug.pdf)... C'est ce que propose de faire Gcortex (tout en accroissant l'immunité au bruit en transportant du 0/5V et non en le fabricant sur place).
 Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
- 20/03/2015, 14h16 #33antek
Re : Servomoteur + moteur continu = parasites?
Bon allez on démonte le servo . Envoyé par Antoane 
- 20/03/2015, 14h16 #34invitef611573a
Re : Servomoteur + moteur continu = parasites?
Merci à tous pour ce flot de réponses, j'attends la livraison des composants pour la suite des expérimentations.
Si jusque là vous avez d'autres idées, n'hésitez pas.
- 20/03/2015, 17h48 #35jiherve
Re : Servomoteur + moteur continu = parasites?
Bonsoir
Le servo se fiche un peu du niveau de ce qu'il y a sur le fil de commande (même si dépassé aujourd'hui voir la DS du NE544), le problème n'est pas là, il faut DECOUPLER en particulier les moteurs de traction, connecter des capas de 100nf entre les bornes d'alim de ceux ci et leur carcasse métallique qui sera réunie à la masse, ne pas hésiter à placer une capa réservoir au plus prés des moteurs.Cablage des masses en étoile impératif, ne pas mégoter sur la taille des fils.
Question subsidiaire : la carte Raspberry n'aurait elle pas des vapeurs lors de l'activation des moteurs?
JRl'électronique c'est pas du vaudou!
- 20/03/2015, 18h26 #36invitef611573a
Re : Servomoteur + moteur continu = parasites?
Non la carte va bien heureusement.
Est-ce qu'on peut m'expliquer le découplage?
J'ai déjà comme dit précédemment des condensateurs 100nF sur les bornes du moteur.
J'avais essayé en mettant trois condensateurs, l'un sur les bornes, et un entre chaque borne/coque métallique du moteur.
Là je n'en ai plus qu'un entre les bornes étant donné que je n'avais pas noté de différence.
- 20/03/2015, 18h32 #37invitef611573a
Re : Servomoteur + moteur continu = parasites?
Je viens de recevoir un UBEC 5V - 3A, on m'avait proposé de remplacer mon 7805 par ça.
Est-ce que je peux le brancher directement entre la batterie et le servo où bien faut-il prendre des précautions particulières?
- 20/03/2015, 18h48 #38invitef611573a
Re : Servomoteur + moteur continu = parasites?
Aucun changement en remplaçant le 7805 par l'UBEC.
- 20/03/2015, 18h54 #39invitef611573a
Re : Servomoteur + moteur continu = parasites?
Aussi j'ai refait un test au multimètre, la tension aux bornes de mon moteur ou de mon servotomeur est de 5,35V avec l'UBEC.
Quand j'active le servomoteur seul, elle reste stable.
Quand j'active le moteur continu seul, elle chute à 5,25V.
Est-ce normal?
- 20/03/2015, 20h06 #40invitef611573a
Re : Servomoteur + moteur continu = parasites?
Je viens de faire passer l'alimentation de ma carte L298N après le régulateur (avant j'alimentais la carte directement avec la batterie de 9V)
Il n'y a pas d'interférence avec le servomoteur en procédant de la sorte.
Il semblerait que mes cartes ne lissent pas la tension comme prévu.
Le problème semble réglé, mais si quelqu'un a l'explication qui va avec, ça me serait d'une grande aide.
- 20/03/2015, 20h13 #41invitef611573a
Re : Servomoteur + moteur continu = parasites?
Oubliez, la fatigue se fait sentir, évidemment mon servomoteur n'étant pas alimenté il ne reçoit pas de parasites.
- 20/03/2015, 20h41 #42invitef611573a
Re : Servomoteur + moteur continu = parasites?
J'arrive à quelque chose de beaucoup mieux quand même en fait.
Je viens de revoir les soudures d'un de mes moteurs, et j'en ai profité pour refaire le test avec 3 condensateurs (j'en ai donc rajouté deux entre borne et coque métallique).
Et effectivement, si je régule mon alimentation de la L298N en 5V, et que j'ai les 3 condensateurs, le servomoteur n'est plus soumis à des interférences.
En revanche, si je remet 9V directement sur ma carte L298N, les interférences reviennent, même avec 3 condensateurs.
Quelqu'un peut-il m'expliquer?
- 21/03/2015, 09h00 #43Antoane
Responsable technique
Re : Servomoteur + moteur continu = parasites?
Bonjour,
Prend plutôt un 74HCT14. Envoyé par Mlikaon
Oui, si tu alimentes en PWM. As-tu une datasheet de ton motor-shield ? Envoyé par Mlikaon
Que se passe-t-il lorsque le rapport cyclique du signal envoyé au L298 est à 100%, i.e. que le moteur tourne à fond ? Envoyé par Mlikaon
As-tu une datasheet ? Envoyé par Mlikaon
C'est a priori pas anormal, la tension est légèrement fonction du courant consommé. Quel est le courant consommé par le moteur ? Envoyé par Mlikaon
A priori une mauvaise idée. En alimentant le avant le régulateur, tu découples les moteurs et (probablement) accroit le rendement. Envoyé par Mlikaon
****
As-tu suivit les différents conseils t'étant été donnés depuis le début du fil ?
- masse en étoile (côté + de la batterie également) ;
- fils torsadés pour aller jusqu'au moteur ;
- gros condensateurs de découplages (i.e. condensateur directement soudés au plus court, entre le + et le - de l'alimentation des circuits) :
* sur l'alim du driver de moteur ;
* sur l'alim du convertisseur 5V ;
* sur l'alim du servo ;
* sur la batterie aussi, tant qu'on y est
- fils de diamètre suffisant.
Je pense que l'amélioration est plutôt un effet collatéral d'un meilleur câblage, et non directement lié à l'alimentation du moteur en 5V. Envoyé par Mlikaon
Dernière modification par Antoane ; 21/03/2015 à 09h03.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
- 21/03/2015, 10h06 #44invitef611573a
Re : Servomoteur + moteur continu = parasites?
Spécificités du moteur :
Gear Ratio 1:120
No-load speed(3V):100RPM
No-load speed(6V):200RPM
No-load current(3V):60mA
No-load current(6V):71mA
Stall current(3V):260mA
Stall current(6V):470mA
Torgue (3V): 1.2Kgcm
Torque (6V): 1.92Kgcm
Size: 55mm x 48.3mm x 23mm
Weight:45g
Type de moteur : 130
****
As-tu suivit les différents conseils t'étant été donnés depuis le début du fil ?
- masse en étoile (côté + de la batterie également) ;
- fils torsadés pour aller jusqu'au moteur ;
- gros condensateurs de découplages (i.e. condensateur directement soudés au plus court, entre le + et le - de l'alimentation des circuits) :
* sur l'alim du driver de moteur ;
* sur l'alim du convertisseur 5V ;
* sur l'alim du servo ;
* sur la batterie aussi, tant qu'on y est
- fils de diamètre suffisant.
Pour les masses en étoile je ne sais pas vraiment comment faire.
J'utilise une breadboard, donc tous mes fils de masse vont simplement sur une même ligne -
Fils torsadés et diamètre suffisant : je ne pense pas en avoir, j'ai acheté un tas de fils de connexion qu'on achète par lot pour les raspberry/arduino. Il y a du M/M, M/F, F/F mais il n'est pas spécifié qu'ils soient torsadés et le diamètre est toujours le même.
C'est ce genre d'article : http://www.ebay.fr/itm/65pcs-Cable-P...item5d479c1810
Condensateurs de découplage : j'ai mis 3 condensateurs de 100nF sur chaque moteur (ce qui, couplé avec le moteur alimenté en 5V supprime à priori mes parasites).
J'ai mis également 200nF en entrée du 7805 et 100nF à sa sortie, mais par contre ce n'est pas soudé, c'est mis directement sur la breadboard (ça marche quand même?).
Je n'ai pas d'autres condensateurs.
- 21/03/2015, 11h53 #45jiherve
Re : Servomoteur + moteur continu = parasites?
Bonjour,
Le problème des breadboard c'est que ce n'est pas conçu pour passer de la puissance, le contact est tout de même résistif, et que la longueur des fils de câblage narrange rien, il faudrait passer à une version soudée.
Pour la distribution en étoile , alim et masse il faut repiquer les deux au plus près de l'alimentation primaire.
C'est le métier qui rentre.
JRl'électronique c'est pas du vaudou!
- 21/03/2015, 16h03 #46invitef611573a
Re : Servomoteur + moteur continu = parasites?
J'ai du mal à me représenter le montage en étoile.
En gros, on a au + et au - de l'alimentation un gros point de soudure d'où partent des fils les plus courts possible et qui vont relier respectivement les bornes + ou - de chaque récepteur?
Et ça en plus du montage de base, donc on a deux fils + et deux fils - pour chaque récepteur?
Du coup oui, mais je dois avouer que la breadboard est très pratique!il faudrait passer à une version soudée
En tout cas pour l'instant, j'arrive à un résultat satisfaisant, je contrôle le mouvement des roues et de la tourelle bien distinctement, sans parasite visible.
Merci beaucoup pour cette aide déjà fournie et ces précieux enseignements.
- 21/03/2015, 16h09 #47Antoane
Responsable technique
Re : Servomoteur + moteur continu = parasites?
Bonjour,
Des câblages en étoiles :
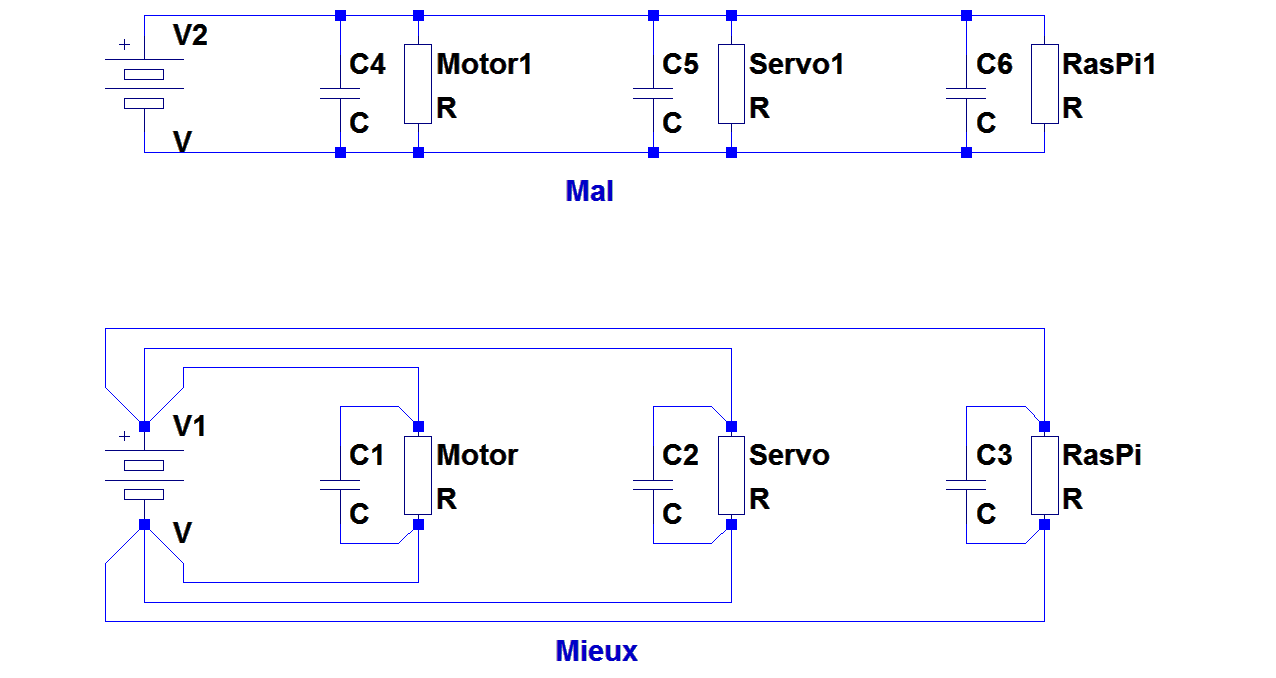 Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
- 21/03/2015, 16h12 #48invitef611573a
Re : Servomoteur + moteur continu = parasites?
Ahhhhhhhh!
C'est bien plus clair comme ça, je garde le schéma sous le coude, merci
Discussions similaires
-
Parasites moteur générés par PWM
Par invite0155ce91 dans le forum ÉlectroniqueRéponses: 3Dernier message: 11/02/2014, 08h50 -
servomoteur à aimants permanents à courant continu
Par said76 dans le forum TechnologiesRéponses: 5Dernier message: 16/12/2012, 09h02 -
transformer un moteur 6V en servomoteur
Par invite8050cc03 dans le forum ÉlectroniqueRéponses: 11Dernier message: 02/12/2010, 17h15 -
Servomoteur / moteur pas à pas
Par invite659e17ac dans le forum ÉlectroniqueRéponses: 18Dernier message: 09/04/2010, 14h00 -
Parasites PIC, moteur et relais
Par inviteeaf9391c dans le forum ÉlectroniqueRéponses: 16Dernier message: 04/07/2007, 08h32