


Bonjour à toutes et à tous,
J'essaie de me lancer dans la robotique et je commence par monter un petit robot sur roues (moteurs à courant continu), avec une tourelle au dessus (servomoteur) pilotée par un raspberryPi.
Cela fait plusieurs semaines/mois que je suis sur le projet, j'ai appris un tas de choses mais là je suis vraiment bloqué sur un problème électronique et personne n'arrive à me donner de solutions sur les forums Raspberry.
En gros, pour faire au plus simple du plus simple, j'ai un servomoteur d'un côté alimenté par sa propre batterie, et d'un autre côté un moteur continu alimenté lui aussi par sa propre batterie.
Mon raspberry est alimenté sur secteur, et il partage sa masse avec celle du servomoteur pour pouvoir piloter le servomoteur sur un de ses pin GPIO.
Quand on est dans cette configuration, j'arrive à lancer un script PWM pour piloter mon servomoteur.
Je peux également voir tourner mon moteur dans le vide sans problème.
Par contre ce que je voudrais, c'est piloter à la fois mon moteur et mon servomoteur par le raspberry, j'ai donc besoin pour ça de raccorder la masse du servomoteur et du raspberry, à celle du moteur.
Et c'est là que les problèmes arrivent : lorsque je partage les masses du servomoteur et du moteur continu, mon servomoteur s'emballe et reste bloqué dans une position maximale, comme si il recevait un signal parasite en permanence.
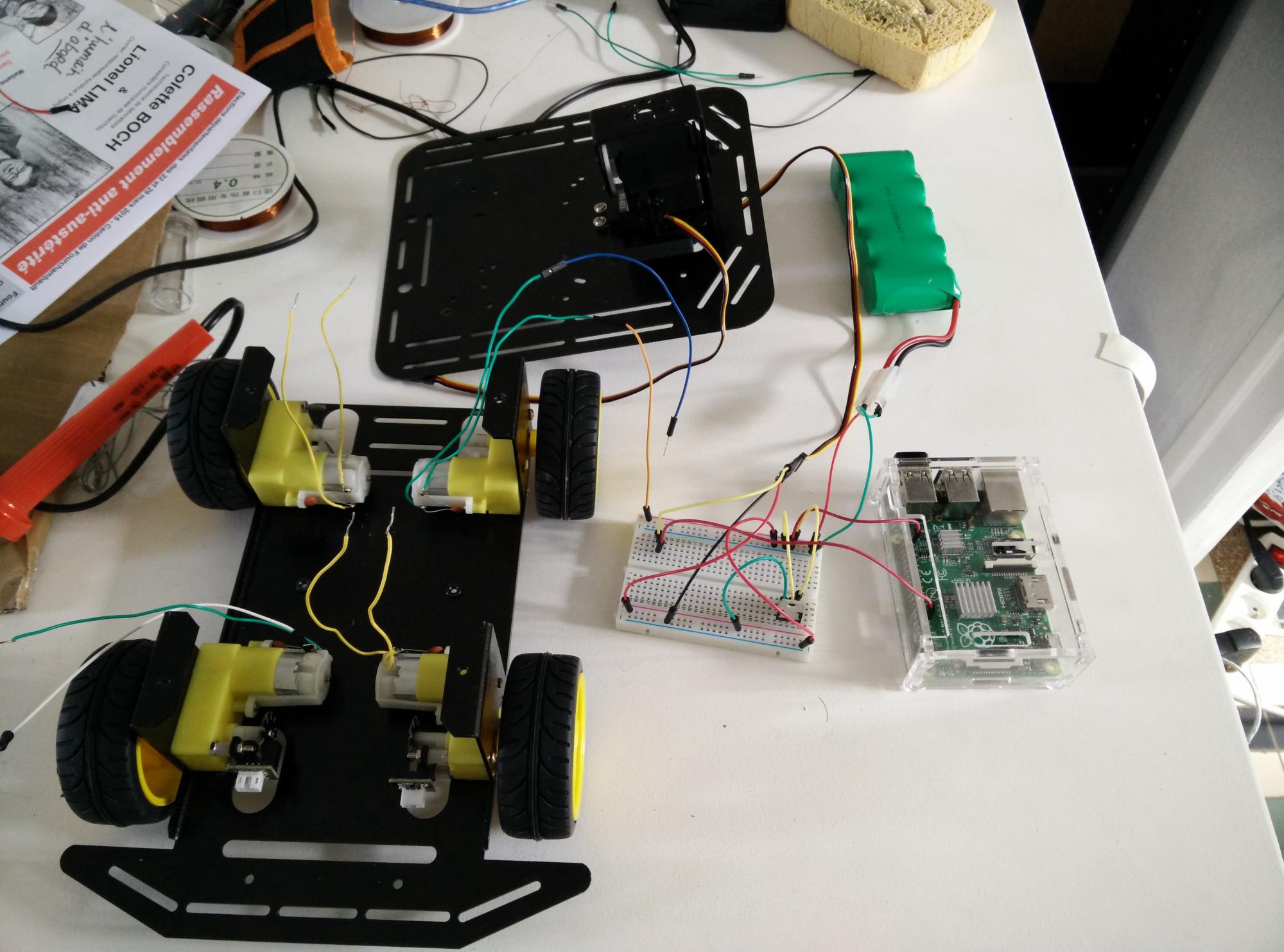
Voici quelques images du montage :
D'abord mon moteur continu, sur lequel j'ai placé un condensateur de 100nF, pour éviter les interférences.
fs1.jpg
Une vue globale des composants (ne faites pas attention au montage il ne s'agit pas de celui là dans l'explication)
fs2.jpg
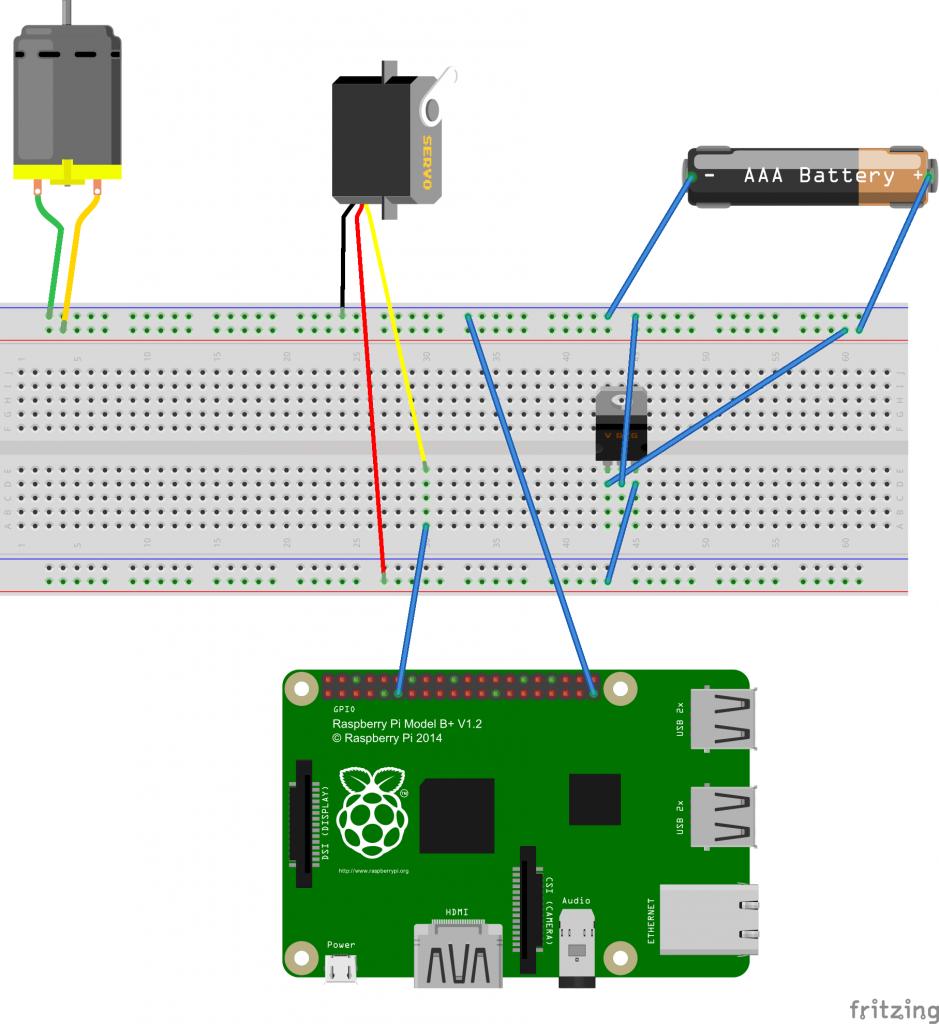
Un schéma du montage actuel que j'aimerais voir fonctionner
fs3.jpg
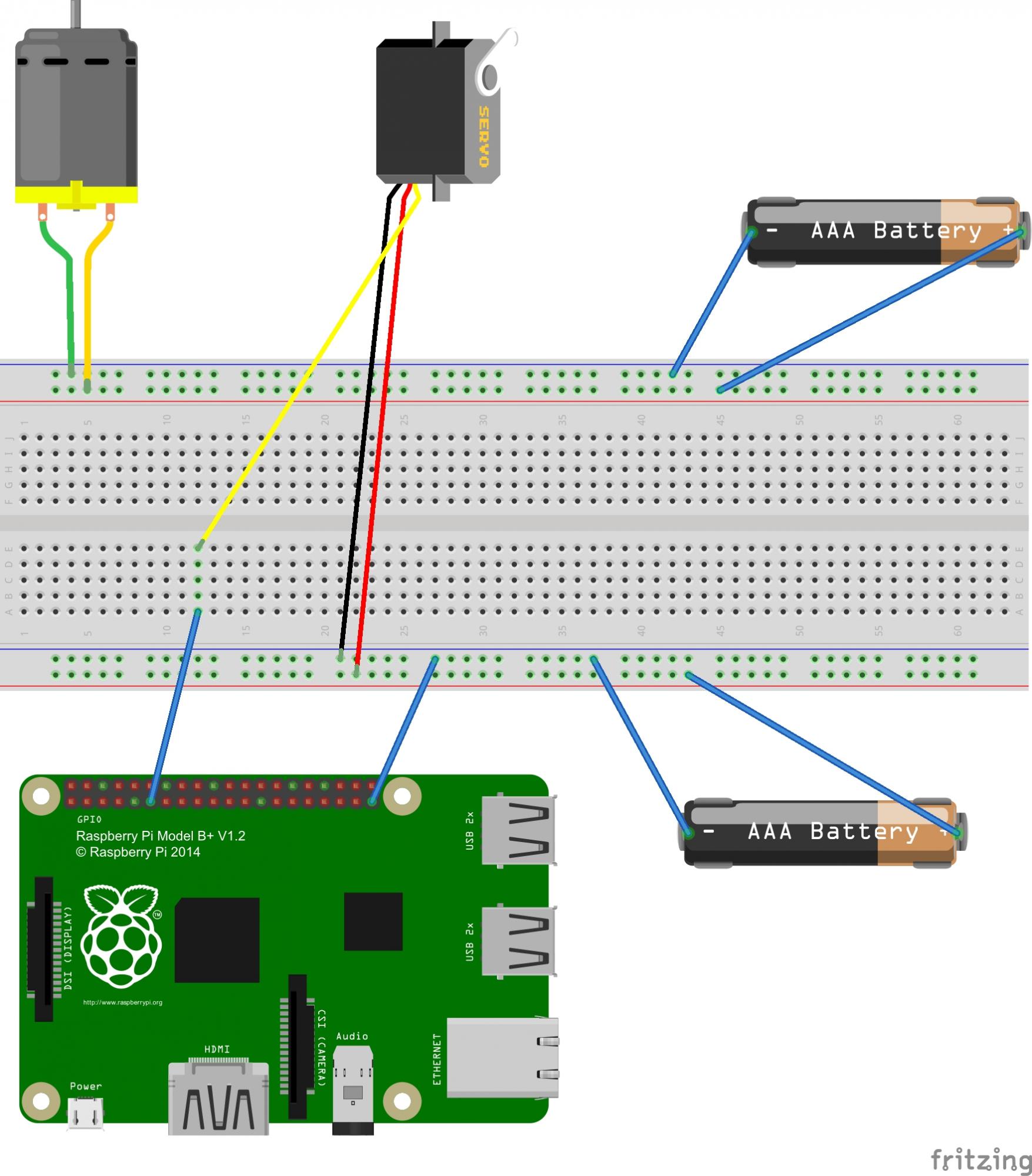
Un schéma du montage précédent, qui lui fonctionne
fs4.jpg
Notez que je le simplifie le schéma actuel, puisque j'ai en fait une carte L298N qui sert de pont en H et régulateur juste avant le moteur mais qui n'y figure pas.
Merci d'avance pour toute l'aide que vous pourrez m'apporter, et n'hésitez pas à me demander des photos/informations supplémentaires.
-----





{kind=link}
{kind=link}
{kind=link}
{kind=link}