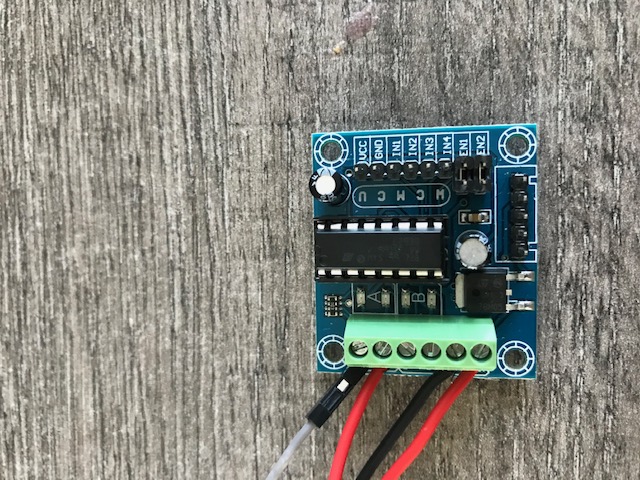
mon schema que j'ai fait je pars de l'arduino 4 et 5 sur IN1 et IN2 du modul L297D , je pars de l'arduino A0 et A1 qui sont reliés a ma plaque d'essaie pour les switchs, ca j'ai compris le cablage avec l'exercice que ma fait faire Simon sur les lien qui ma envoyer
de l'arduino depart 5v et gnd vers ma plaque d'essaie et je redistribue au modul l297d et pour mon moteur je suis cablé sur mon modul L297D (A+ et A-).
si vous voulez je peux faire une photo du cablage
-----