

Bonjour,
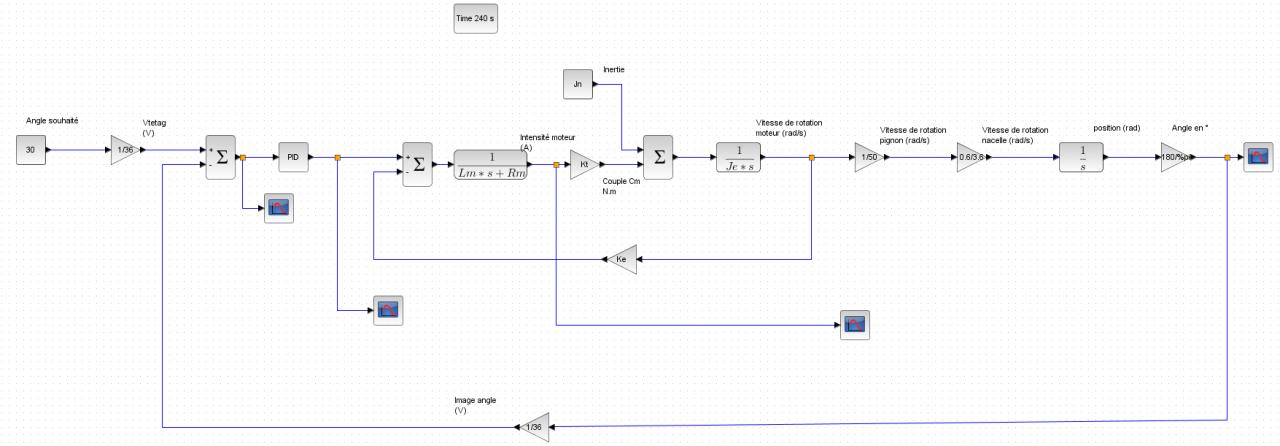
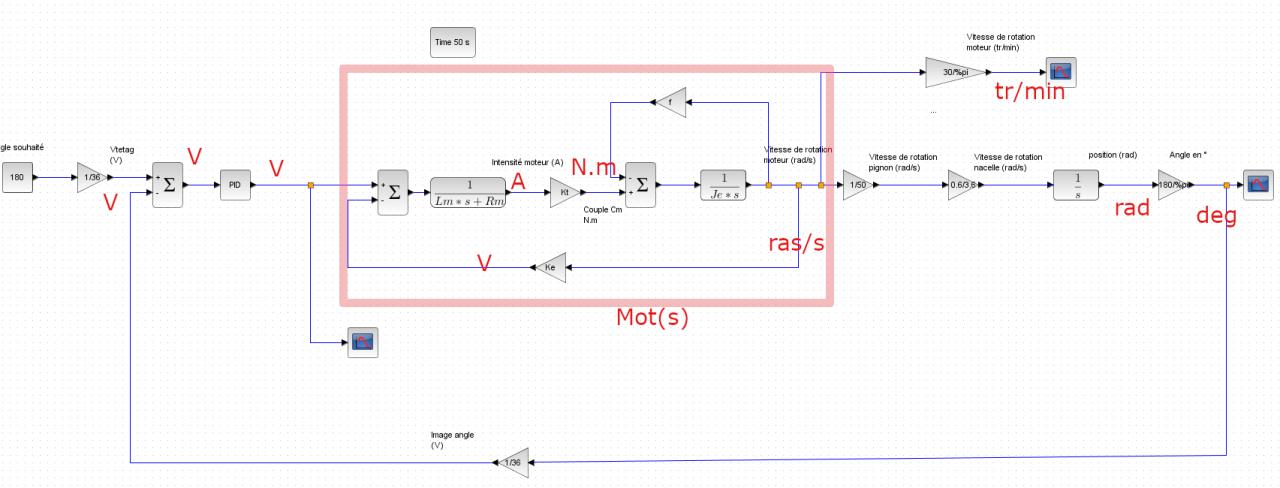
J'essaie de modéliser un contrôle de position avec un moteur CC asservie par un PID.
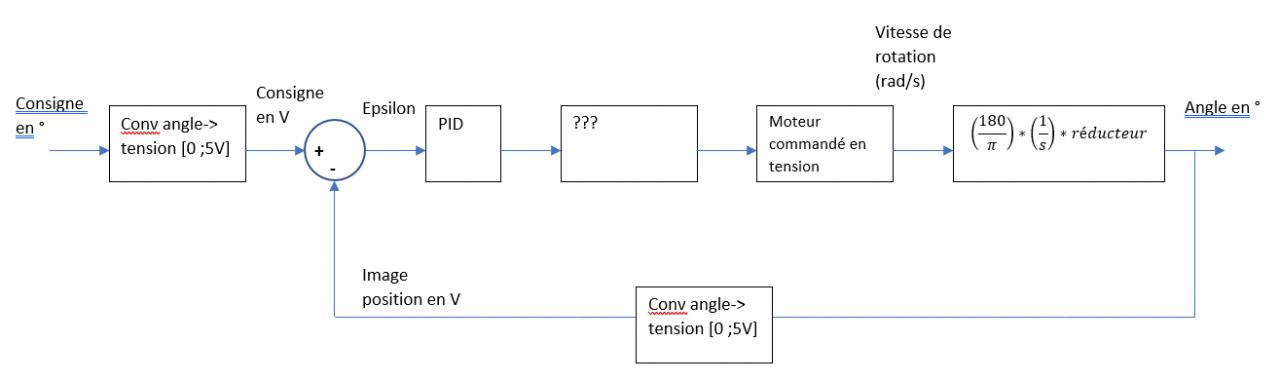
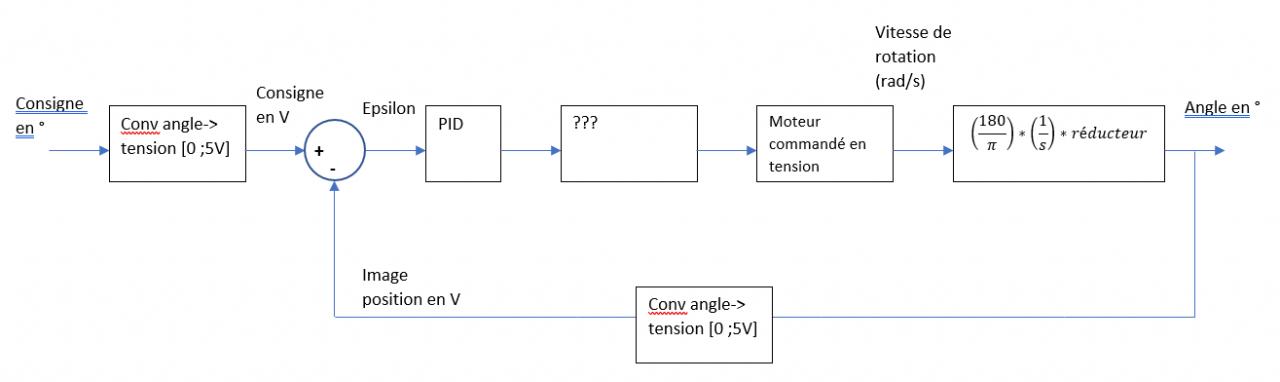
Le modèle du moteur me semble correct, par contre j'ai un souci sur la commande de celui-ci. J'ai en effet comme erreur "epsilon", la différence entre la consigne et la position. Je met le correcteur PID sur cette erreur. Par contre comment je traduis ça en consigne pour le moteur ?
Si quelqu'un sait comment faire le lien entre le PID et le moteur CC.
Voici une image de mon schéma actuel.
Cordialement.
-----



 )
)
{kind=link}