

Bonjour à tous.
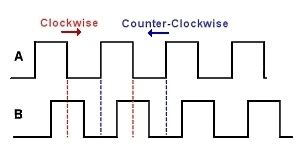
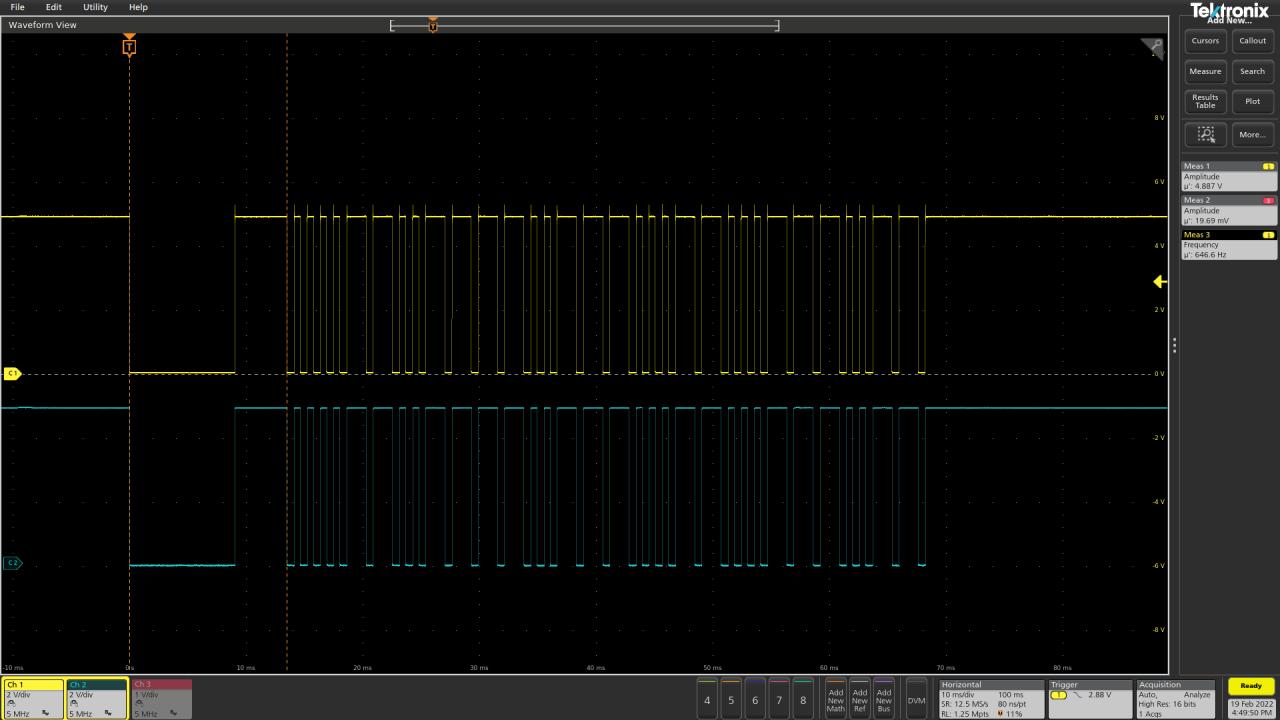
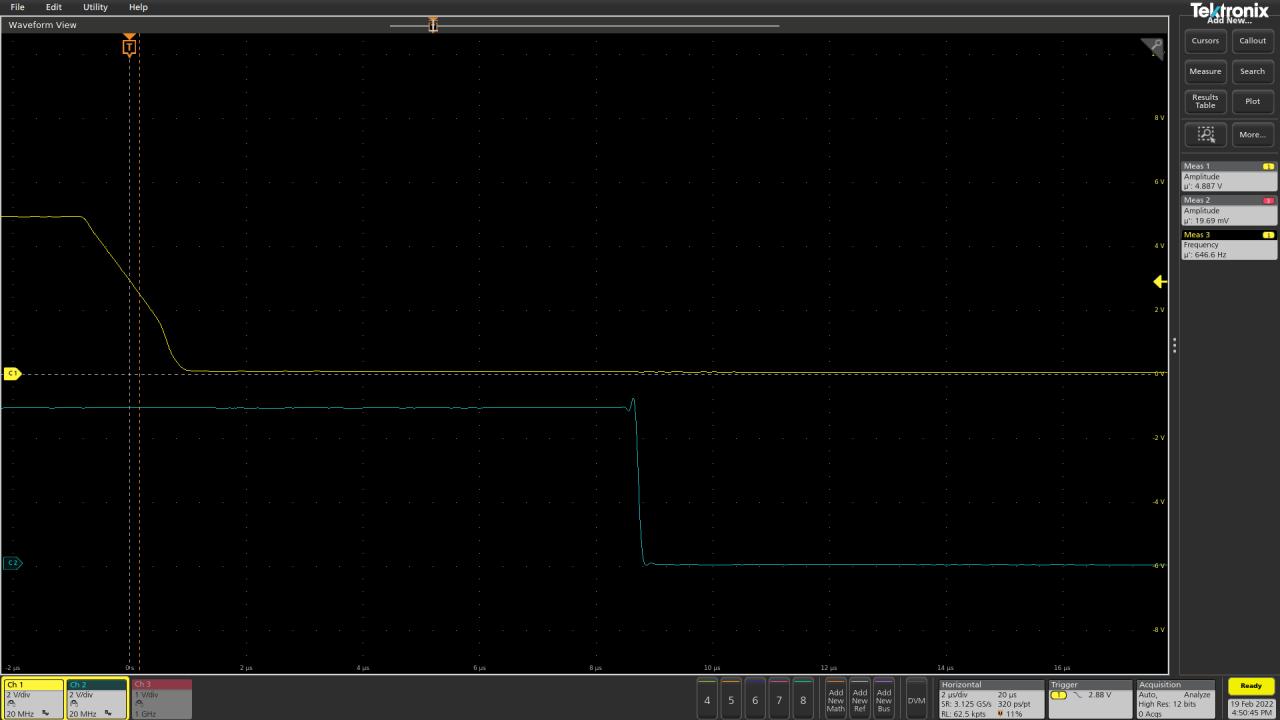
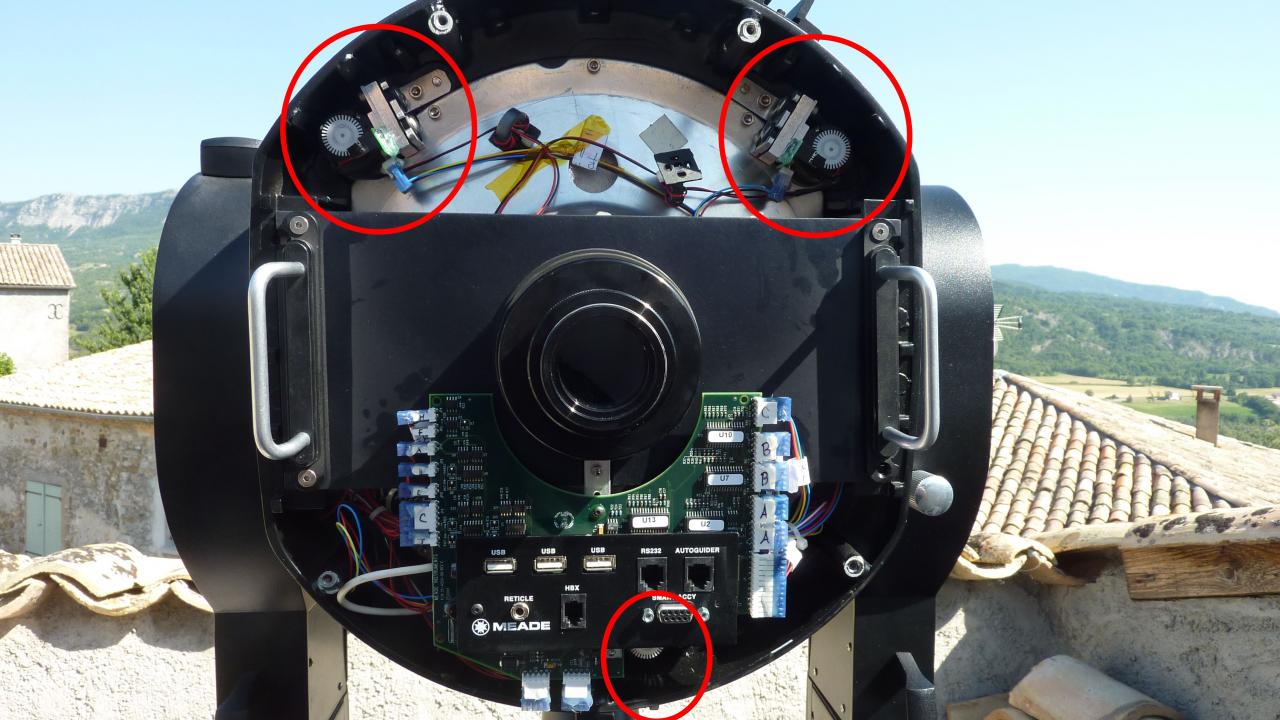
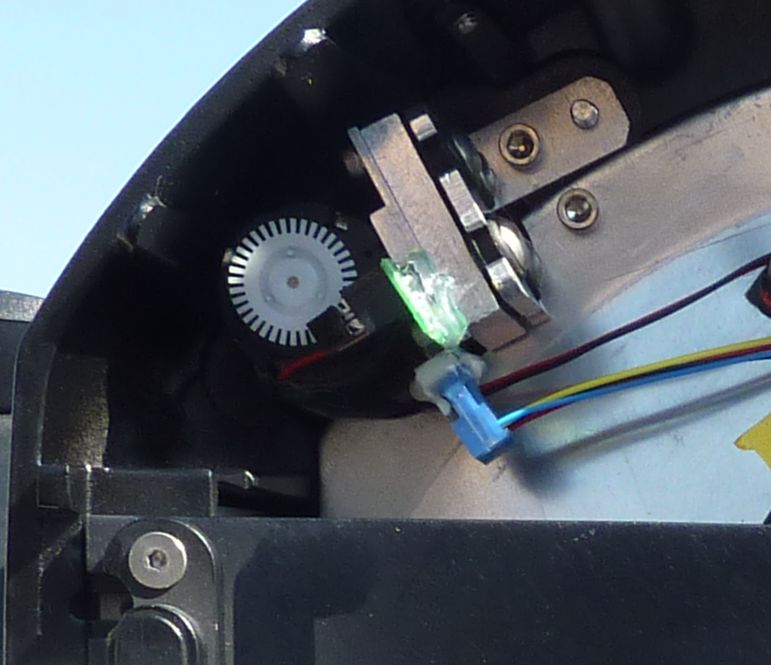
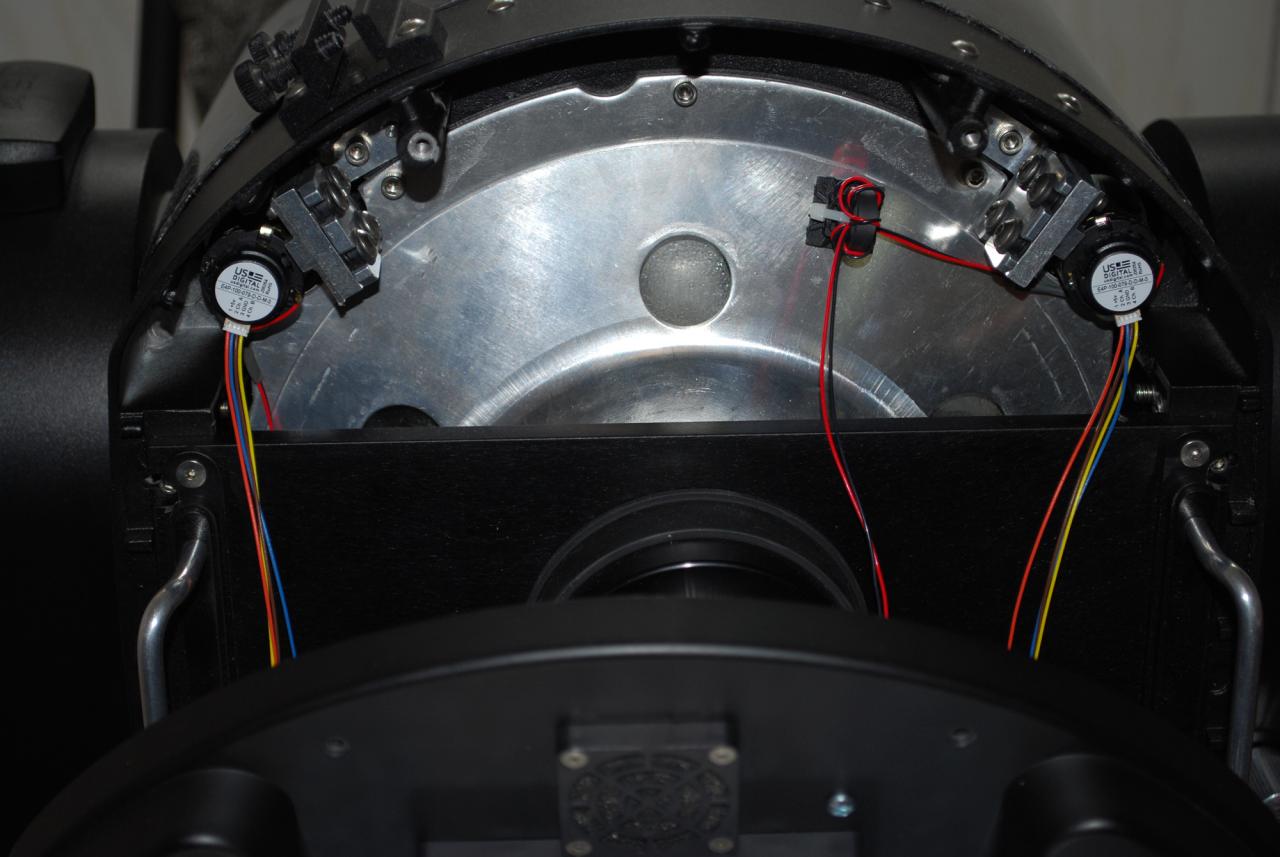
Je possède un télescope comprenant 3 moteurs CC (tension d'alimentation = 5V) couplés à un encodeur US-DIGItAL de ce type :
https://www.usdigital.com/products/e...ental/kit/e4t/
qui servent à la focalisation et la collimation de l'optique.
La commande originelle de ces moteurs est HS.
Existe t il un (des) circuit(s) permettant - au moyen d'un boîtier présentant des boutons poussoir et un contacteur rotatif à plusieurs positions (que je peux fabriquer moi même) - de :
* commander ces 3 moteurs simultanément de manière à ce qu'ils effectuent exactement le même nombre de tours à chaque pression sur un bouton (focalisation).
* commander chaque moteur indépendamment des deux autres (collimation).
* agir simultanément sur la vitesse et le sens de rotation des 3 moteurs (focalisation).
* agir sur la vitesse et le sens de rotation de l'un ou l'autre des 3 moteurs (collimation).
J'ai des connaissances de base en électronique et suis capable de me servir d'un fer à souder pour installer des composants sur une carte.
J'ai une petite expérience avec Arduino, ayant fabriqué pour mon petit-fils un système de commande train miniature HO trouvé sur le site :
http://udelmas.e-monsite.com/pages/c...-wifi-d17.html
Si quelqu'un peut me fournir un schéma, ou me dire quels circuits acheter, ou m'indiquer un site ou je trouverais de l'aide pour résoudre ce problème, ou simplement me conseiller sur ce projet, je lui en serais très reconnaissant.
-----

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}