

Merci Vincent : tes explications claires enchantent mes vieux neurones!
Je comprends, mais je suppose aussi qu'on ne peut pas les baisser n'importe comment (en gardant leur rapport bien sûr).Envoyé par Vincent PETIT

On parle en Ohms, dizaines, centaines, milliers... comment les détermine-t-on ?
Bonne soirée.
-----


 )
)
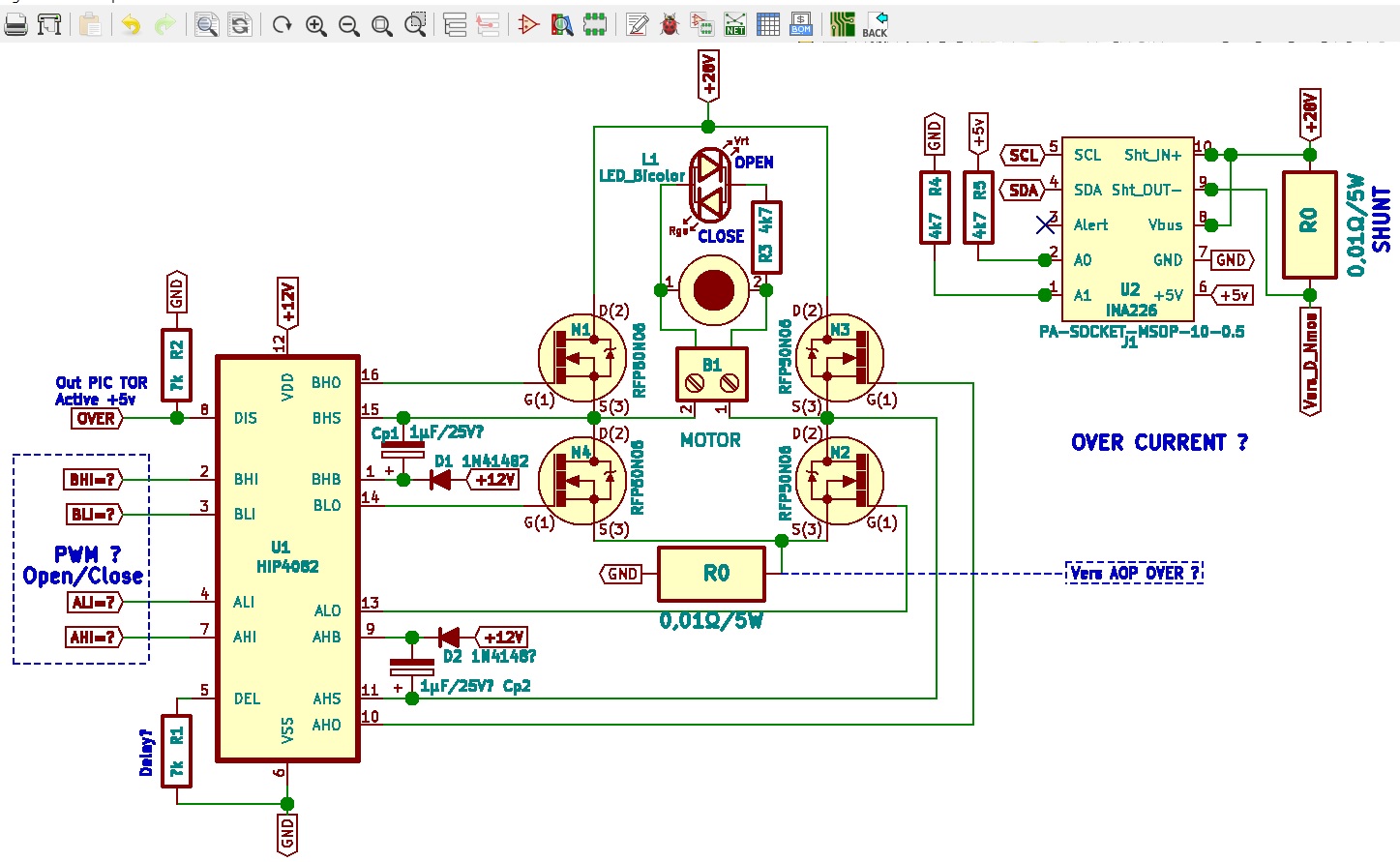
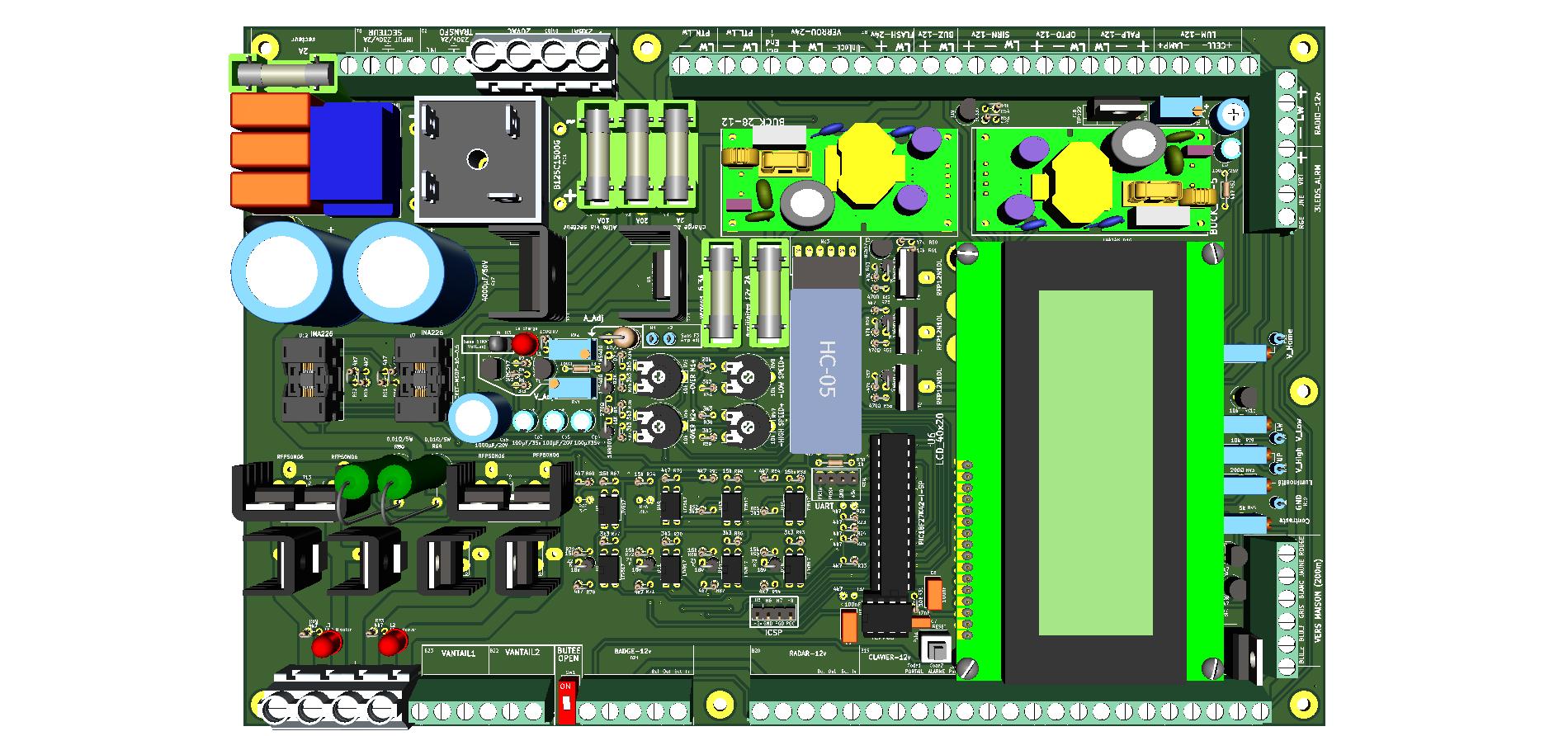
 Je serais très reconnaissant à qui pourrait "compléter" mon schéma de travail avec cet HIP... et lever mes interrogations.
Je serais très reconnaissant à qui pourrait "compléter" mon schéma de travail avec cet HIP... et lever mes interrogations.
{kind=link}
{kind=link}