

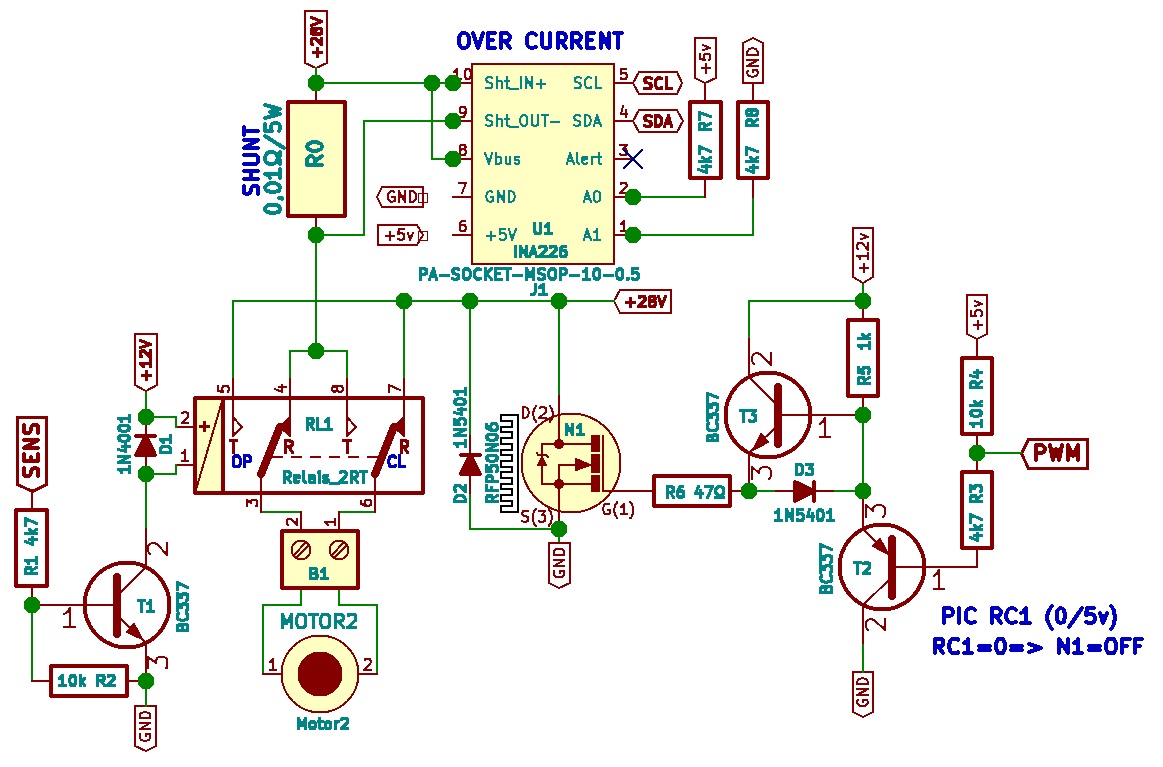
D'abord pourquoi un opto quand on n'a pas besoin d'isolation galvanique ?
J'ai lu "c'est plus propre" avec des nmos, cela aurait mérité une explication.
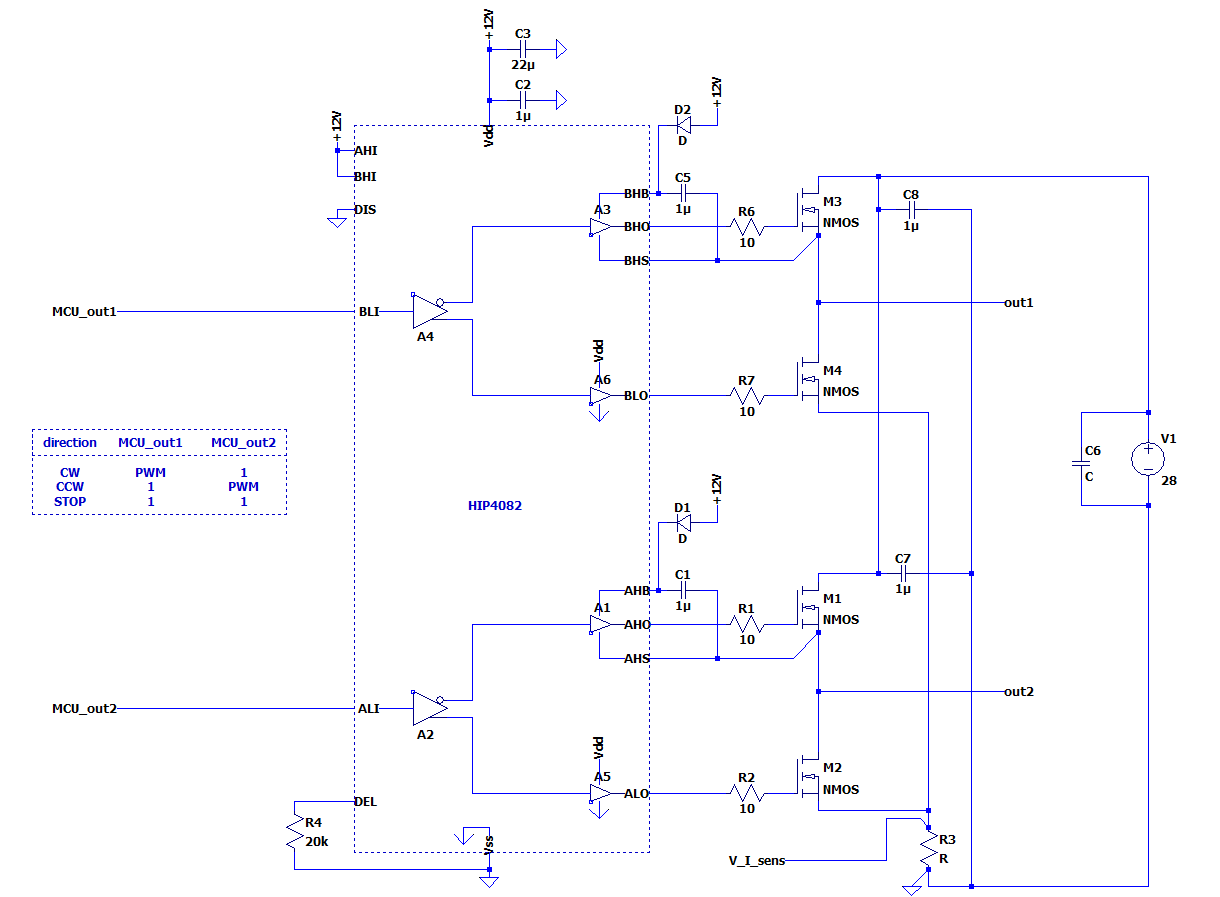
Et par absence d'envie je n'ai pas détaillé la datasheet du HIPxxx
Il est vrai que dans une discussion avec plusieurs intervenants il devient difficile de s'y retrouver surtout si en plus leurs points de vue sont différents.
Et effectivement, si un intervenant propose une solution ayant la faveur du demandeur sans donner suite à ses interrogations, ben ça va pas.
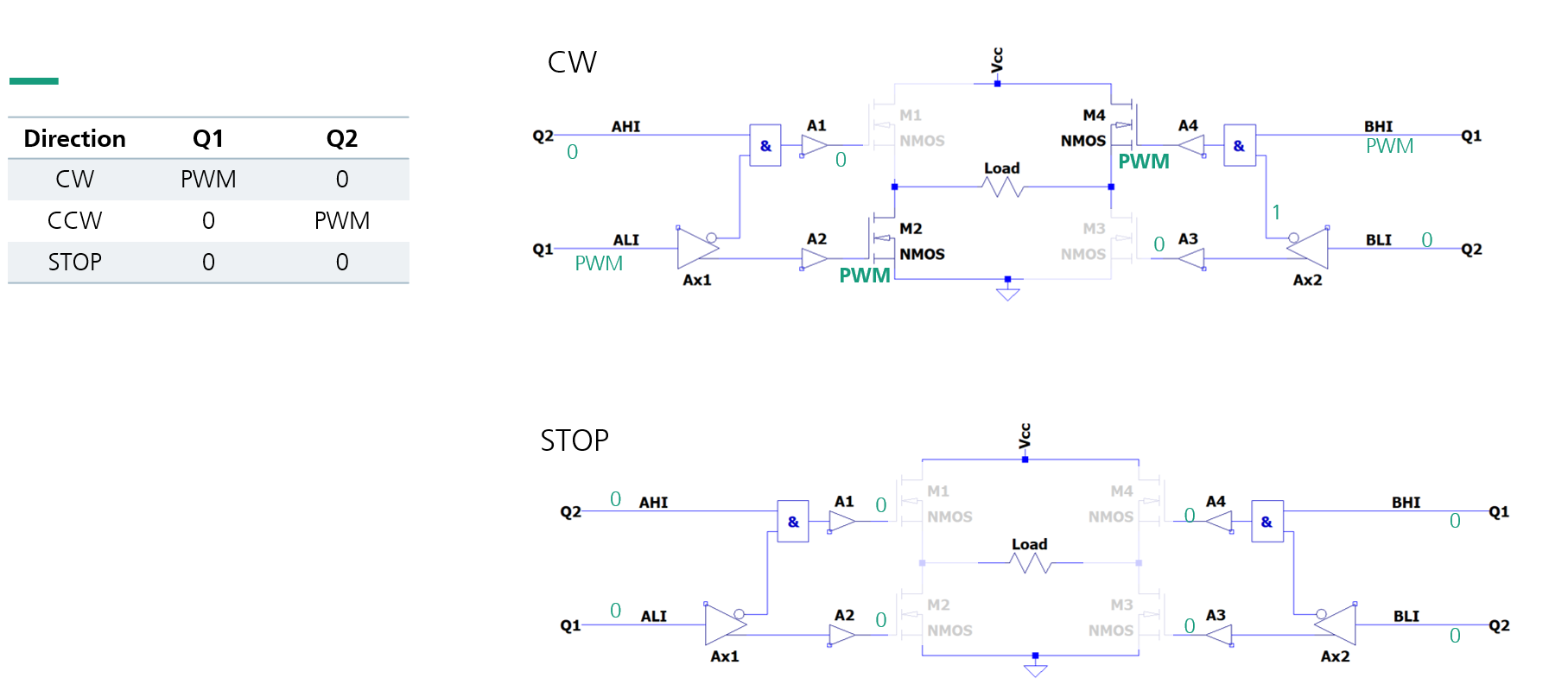
Mes pistes sont celles initiées par Vincent #26, et inutile que je revienne dessus.
-----


 et encore
et encore 
{kind=link}
{kind=link}
{kind=link}