J'insiste, mais il m'arrive d'avoir du mal à comprendre des choses simples. Alors ignore ce message s'il est inutile . . .
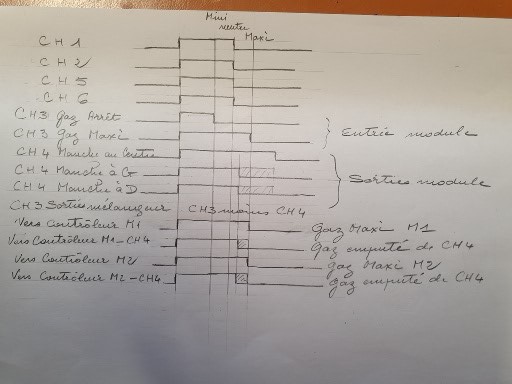
Au niveau du récepteur, la commande de gouverne est un pwm 50 Hz dont la durée de l'impulsion indique le sens et l'intensitée de l'action à obtenir.
Il suffit (?!) donc de mesurer une seule durée pour élaborer une commande pour chaque moteur, avec un µC c'est plus simple et plus souple.
J'avais fait un truc comme ça de A à Z, mais sur des fréquences pas prévues pour ça . . .
-----