

Bonjour à tous,
Je cherche à me renseigner sur les différents capteur qui me permettrais de connaitre le sens d'orientation d'un objet.
Il est souvent expliqué plusieurs notions, et parfois même les deux à la fois, alors je me mélange un peu les pinceaux entre gyroscope, accéléromètre, magnétomètre etc...
Je souhaiterais un système qui n'as pas besoin de référencement, calibration.
Actuellement j'utilise 2 systèmes "mécaniques" qui sont pas trop mal mais parfois (quand je bouge la carte électronique doucement) il faut tapoter dessus pour que la position soit prise en compte. C'st pourquoi je cherche un sytéme à puce électronique. ( datasheet )
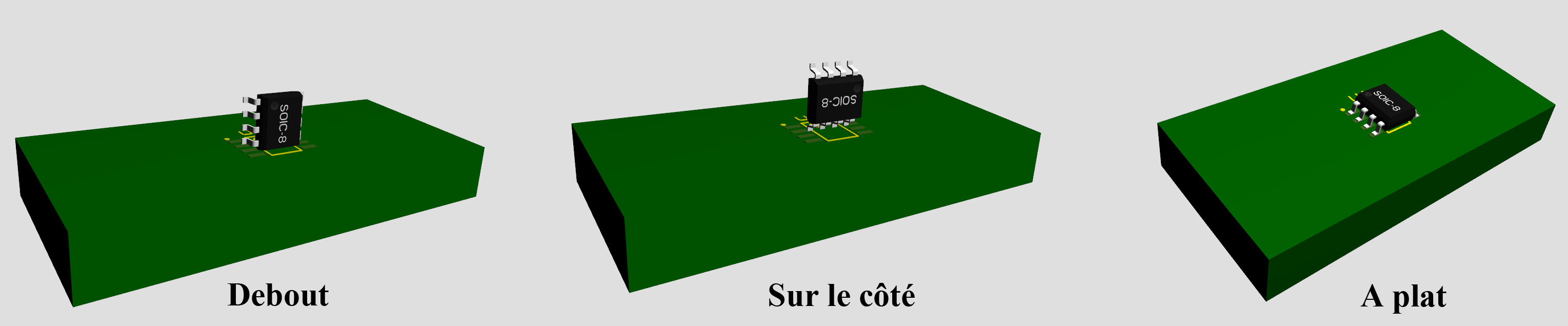
J'aimerais détecter l'orientation sur 3 axes comme sur le schéma suivant
Disons que la partie verte représente une table , et le CI l'objet et son orientation.
Voila si quelqu'un a une quelconque conaissance dans ce domaine je suis preneur de toute explication, conseils, suggestions.
Merci
-----

{kind=link}
{kind=link}