


Bonjour,
Je suis actuellement en train de réaliser un robot, et je recherche une formule pour effectuer une trajectoire particulière.
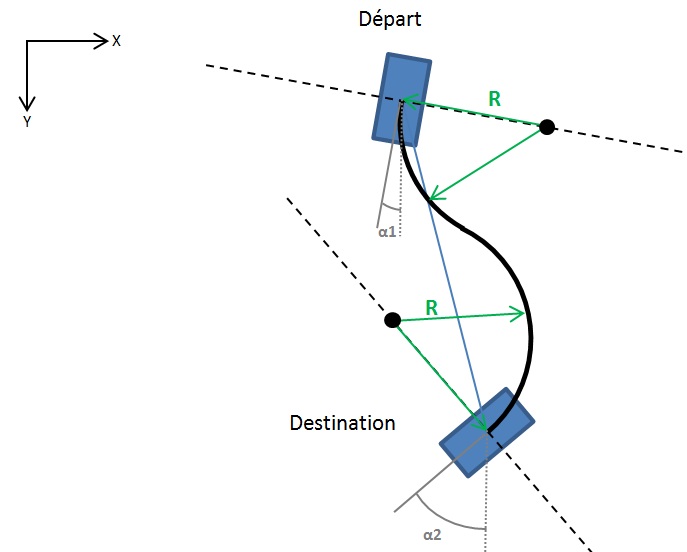
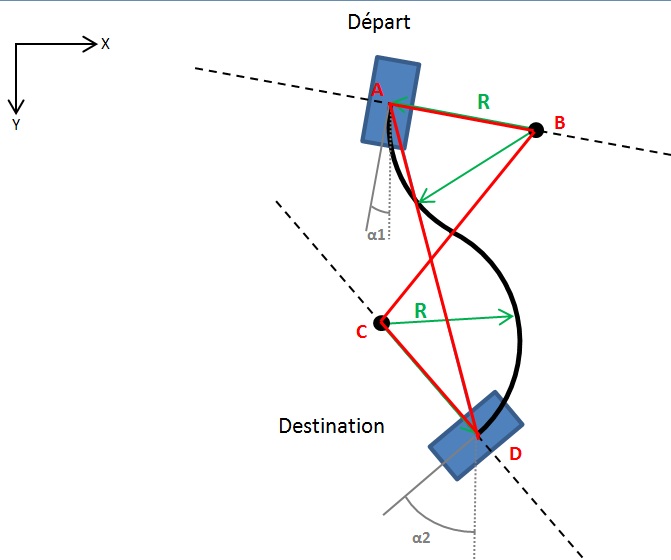
Je connais en permanence la position X, Y et l'orientation de mon robot. Je souhaiterai réaliser une fonction qui, à partir des positions X,Y et l'orientation du point d'arrivé, me trouverait une trajectoire à base de deux arc de cercle.
Schéma :
Exemple (correspondant à la figure) :
Départ : X=250, Y=150, α1=10°
Destination : X=290, Y=306, α2=50°
Je recherche la valeur de R qui vaut environ 58 (Valeur approximative trouvée en tâtonnant)
Merci d'avance, et n'hésitez pas si quelque chose n'est pas clair.
-----
 Ça mérite quelques jours de recherche par tâtonnement pour avoir une solution acceptable et qui ne prenne pas 1h de calculs par l'ordi
Ça mérite quelques jours de recherche par tâtonnement pour avoir une solution acceptable et qui ne prenne pas 1h de calculs par l'ordi 


 , j'ai essayé de repondre un peu plus largement, la question étant postée en "math du supérieur".
, j'ai essayé de repondre un peu plus largement, la question étant postée en "math du supérieur".
{kind=link}