


Bonjour,
N'ayant pas les compétences informatiques nécessaires, je me tourne vers vous pour m'aiguiller.
Comme le titre l'indique, j'ai besoin de piloter une caméra située en haut du mât d'un navire.
La caméra doit pointer sur un autre navire.
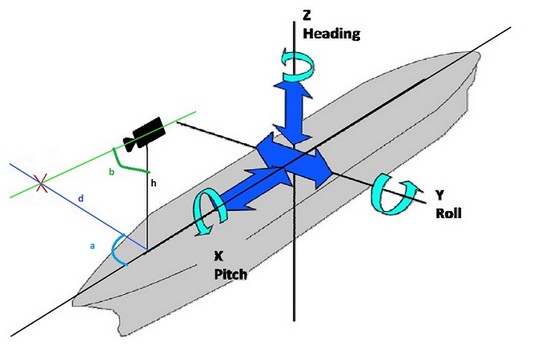
Je connais la distance relative de la "cible" par rapport à la position de mon navire et l'angle par rapport à l'axe horizontal de mon navire.
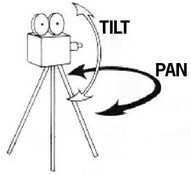
J'arrive à définir l'angle de rotation horizontal (pan), et l'angle d'inclinaison vertical (tilt) de la camera quand les valeurs pitch et Roll de mon navire sont à zéro.
pantilt.jpg
Camera.jpg
Par contre, je ne sais pas du tout comment corriger ces valeurs (pan et tilt) en fonction des valeurs Pitch et Roll de mon navire.
Le but étant que la cible se trouve dans le champ de vision de la caméra, même un calcul me permettant de définir approximativement les valeurs pan et tilt de la caméra m'aiderait!
Est-ce que quelqu'un aurait une idée sur ce problème?
Par avance merci!
{kind=link}
{kind=link}
-----