

Bonjour,
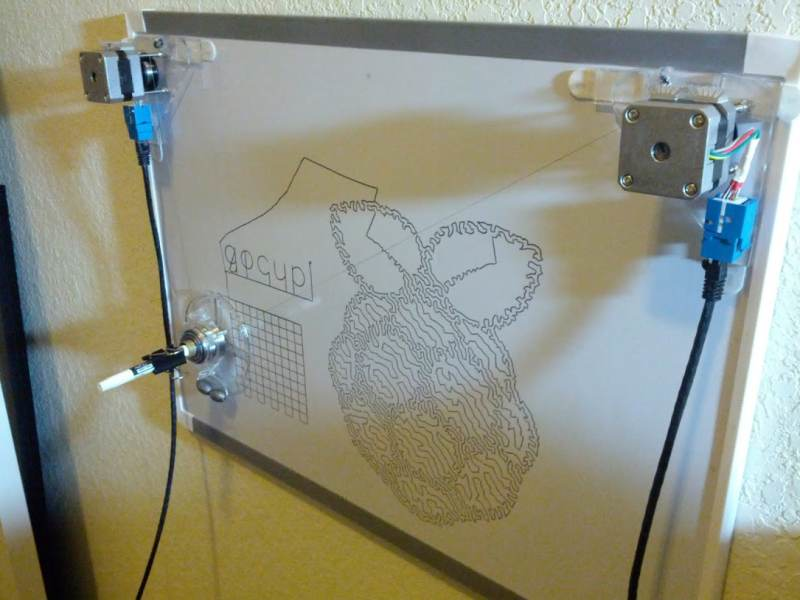
Dans le cadre d'un projet 'artistique', je souhaite piloter un point de coordonnées x et y avec des fils enroulés sur des poulies.
Ce genre de machine existe déjà sous le nom de POLARGRAPH
024b73fafea14e63f98b5c647d453965.png
Afin de matriser complètement le système que je réalise, je souhaite comprendre et maitriser la totalité de la programmation du système.
Je vais alimenter ce 'robot' avec des fichiers de points contenant des coordonnées x et y. Pour se faire, le système va devoir convertir les coordonnées xy en valeurs de rotation des poulies. Il y a donc quelques calculs à intégrer...
Je ne vous cacherai pas que malgré une formation de BAC+5, j'ai aujourd'hui beaucoup de difficulté à trouver les relations mathématiques qui permettent de transformer mes coordonnées xy en angles de rotation des poulies...
J'ai pourtant fait durant mes études de la cinématique, des matrices de changement de repère, mais plus rien n'est opérationel à ce jour...
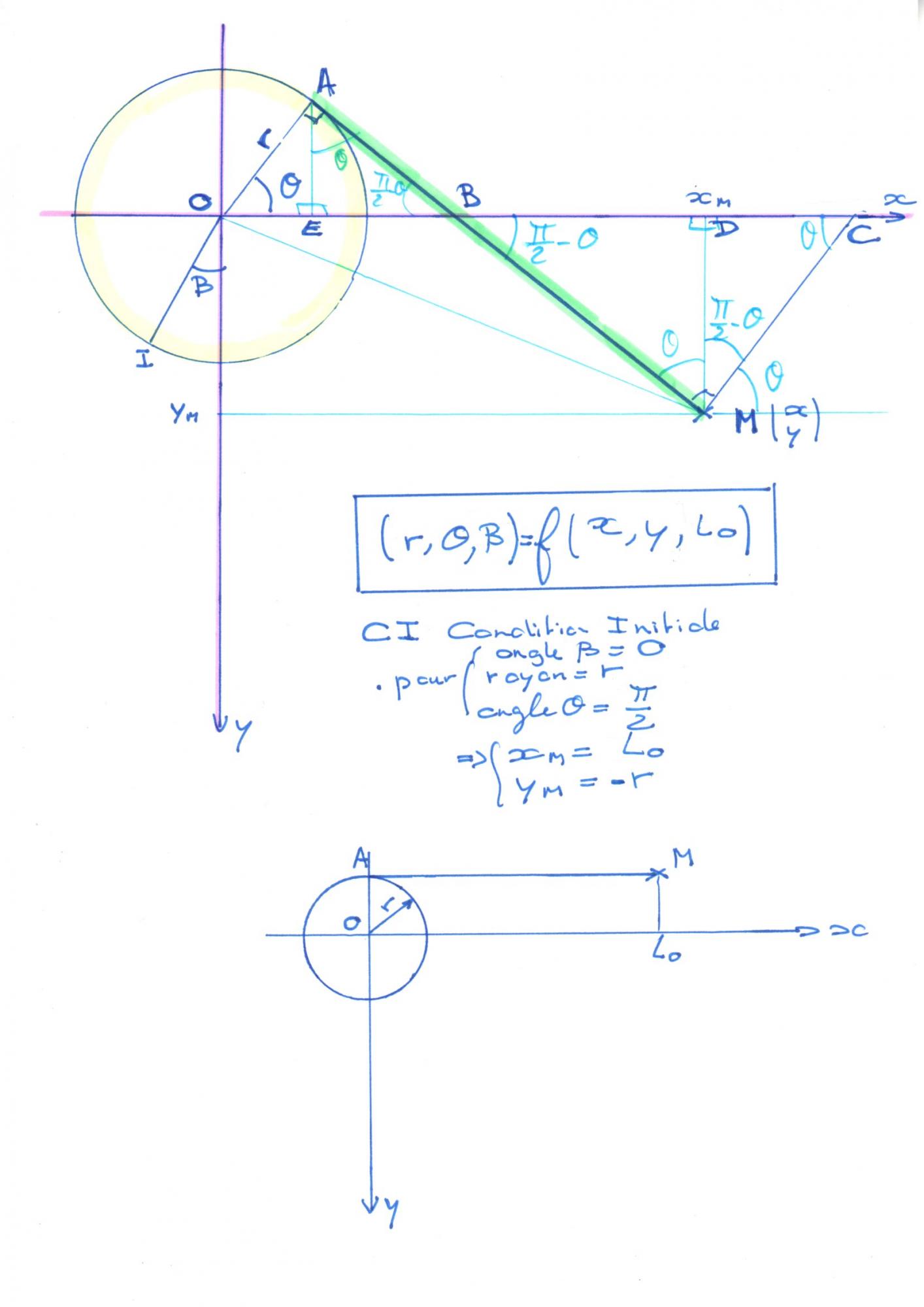
Je vous poste ci dessous le schéma de base qui devrait permettre de trouver les fonctions de transformations nécessaires.
img381.jpg
La poulie dessinée en jaune à un rayon r
Pour la calibration de la machine, j'ai imaginé des conditions initiales qui pourraient être modifiées.
Sauriez-vous m'aider dans cette tache?
PS: je ne fais pas partie de la génération à qui des logiciels comme MATHEMATICA ont été enseigné... Si une ame charitable voulait bien donner quelques conseils aussi sur l'utilisation de tels logiciels, ça serait hyper sympa
Merci par avance
{kind=link}
{kind=link}
-----