

Bonsoir à tous,
Je suis en train de concevoir un robot afin de ramasser des balles de tennis.
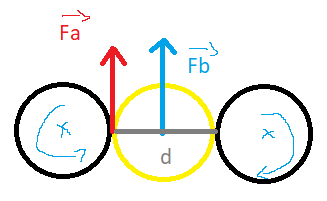
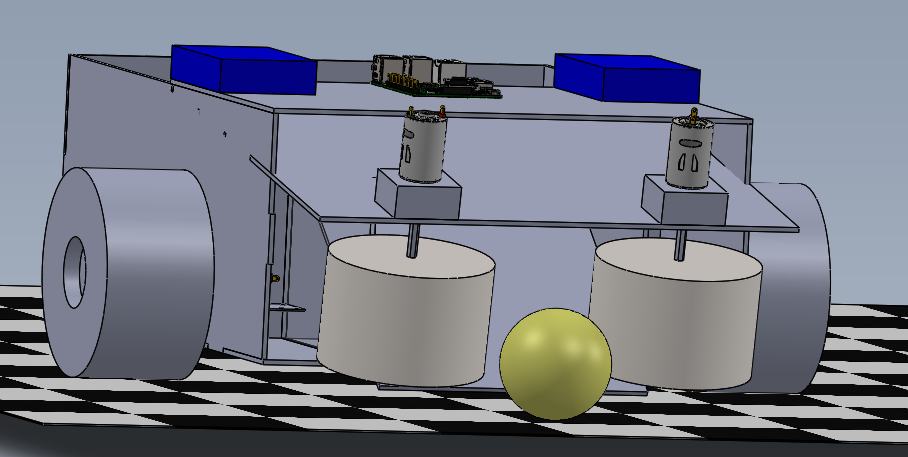
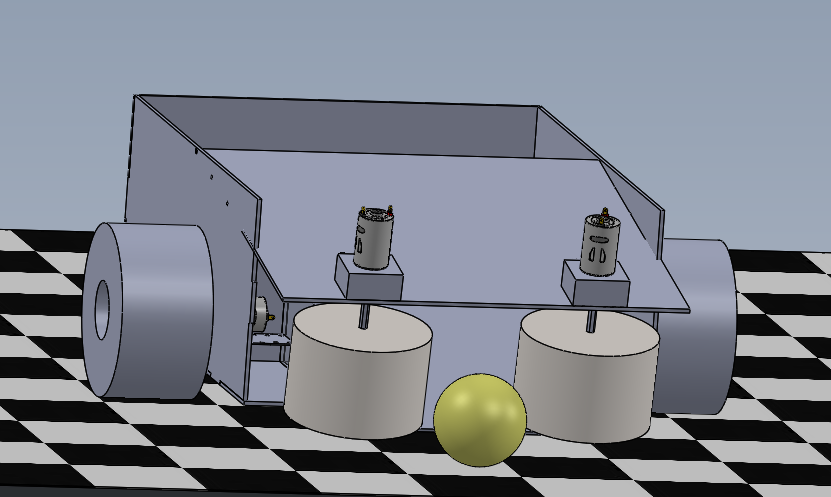
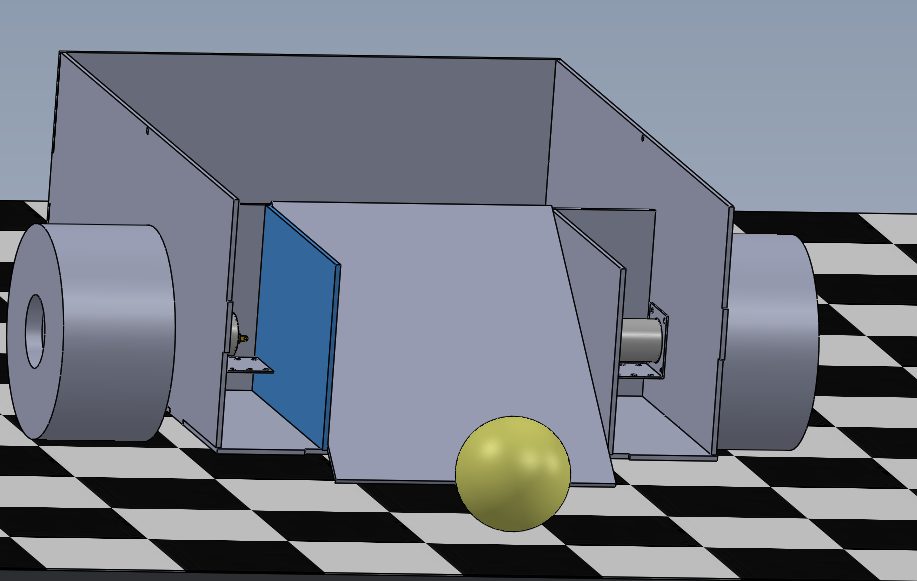
Pour attraper les balles, j'ai choisi d'utiliser un système de projection avec deux cylindres en rotation. ll faut s'imaginer que les deux cylindres ne tournent pas dans le même sens (un sens horaire, l'autre anti-horaire) afin "d'aspirer" la balle de tennis.
Pour faire tourner ces cylindres, je voudrai utiliser un seul moteur CC, puis réaliser un petit jeu d'engrenage (en impression 3D) afin deux sorties : un pour chaque cylindre.
Est-ce une bonne ou une mauvaise idée? Est-ce que je m'embête pour rien et je dois plutôt utiliser deux moteurs ?
A vos avis.
Je vous remercie d'avance
-----




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}