Bonjour
Et maintenant vous vous posez les questions … au risque de remettre en cause l'automate cablé ….
Certes, ça occupe …..
De ce que je sais, quand un automate de porte à bras se mets en sécurité (suite à des détections internes qui dépendent du constructeur, celui-ci stoppe le courant moteur , et fait clignoter sa lampe d'éclairage ce zone. Je ne connais pas, bien que cela puisse exister une sortie spécifique par contact.
Après une mise en sécurité, sa commande par impulsion ouverture/fermeture ne fonctionne plus, et seul une action permanente (BP mural, ou Tcde) met en mouvement le moteur (pendant le temps d'appui) pour je crois, ouvrir la porte (cad pouvoir entrer et remédier au problème . Je crois qu'il faut couper le courant un instant pour faire un RAZ de la position de sécurité.
A défaut, il faut débrayer mécaniquement l'actionneur (ficelle) pour pouvoir manœuvrer la porte.
Tout ceci, pour en conclure que quand on a un automate à réaliser, il faut déjà bien modéliser les automates ou réactions des matériels commandés.
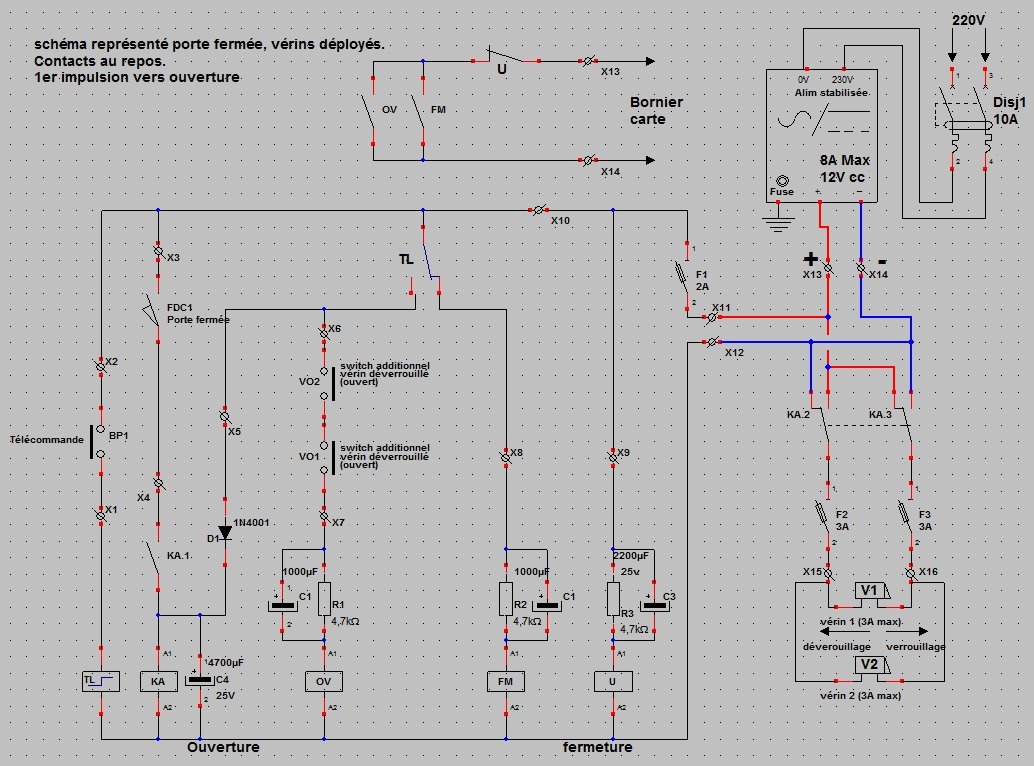
Par ailleurs, il est toujours très dangereux d'installer des capteurs complémentaires, indépendants de ceux delà utilisés par les automates … car ils ne sont, par la suite non contrôlables, et par suite de réglages divers et variés, donnent des informations en discordance avec les capteurs fonctionnels … c'est le cas de :
- contact installé sur le vérin ….. position entré - sorti ?, ..)
- contact de position de porte ….(fermée)
De par mon expérience en systèmes complexes répartis (jusqu'à 10 000 fils de connexion entre sous-ensemble du temps des relais et des infos analogiques) je considère vous avez réalisé une "usine à gaz" que seul vous (cad un spécialiste) pourra mettre au point, dépanner, et surtout re-régler lors de son vieillissement (donc déréglage, variation) des équipements et sous-ensemble.
Je maintiens, que pour avoir un système viable robuste, rustique …. bref utilisable , il faut minimiser ses configurations d'entrée (2 entrée = 4 configuration, 8 entrées =64 configuration avec un mélange de logique combinatoire et de logique séquentielle ) … ce qui sous-entend minimiser les entrées fonctionnelles .
C'est dans cet esprit que je vous avais proposé une exquise de graphe … voir N° 84
Pour moi, un automate fonctionnel simple, rustique et symétrique (cad unique donc sans relais type TELERUPTEUR TL) pour l'ouverture et la fermeture. (donc sans risque d’incohérence entre les 2 automates)
Cela ne vous empêche pas, si vous en éprouvez/avez le besoin, tant pour des raisons sécuritaires que des raisons d'information à distance d'implémenter un deuxième automate dit de "supervision"
Fonctionnement et maintenance n'en seront que plus aisé.
Par ex, la sécurité fonctionnelle (risque de casse de l’actionneur de la porte) : être certain que les deux vérins sont ouverts peut être effectivement réalisée par 2 contacts implantés sur la partie fixe de l'actionneur mais peut aussi être réalisé par l'intermédiaire de leur contact interne : Courant nul (ce qui évite une duplication de capteurs, surtout que m’on peut faire un contrôle unique pour les 2 capteurs).
A noter que si on réalise une détection de courant nul, on peut très bien s'en servir aussi pour s'assurer que l'actionneur a bien atteint sa position "sorti" destiné à verrouiller mécaniquement la porte.
En ce qui concerne la porte, on peut savoir que sa manœuvre par l'automate est en cours, son sens par la tension d'alimentation du moteur … (niveau et signe)
Bref …. l'objet étant la "robustesse" et la "rusticité" de la logique de commande.
Mais je ne suis partie prenante de ce projet : ni en conception, ni en développement, ni en tant qu'utilisateur …
Cordialement ...
-----