
Non,
Encore une fois, il s'agit d'une commande linéaire, c'est sur à 100%.
Je sais que ça n'est pas courant (uhuh), mais il s'agit d'un design vieux de plus de 20 ans.
A cette époque les PWM n'étaient peut être pas encore à la mode.
-----


Non,
Encore une fois, il s'agit d'une commande linéaire, c'est sur à 100%.
Je sais que ça n'est pas courant (uhuh), mais il s'agit d'un design vieux de plus de 20 ans.
A cette époque les PWM n'étaient peut être pas encore à la mode.
Bonjour à tous
Voilà une très bonne réponse, constructive à souhait!Envoyé par Driounet

La vérité, c'est que je n'y ai rien compris.
Tu ne réponds pas à mes interrogations qui permettraient de comprendre le fonctionnement prévu.
Tu affirmes tes certitudes: 100% linéaire, sans refroidisseur, pas PWM qui n'existait pas il y a dix ans, alors qu'on en fait depuis plus de cinquante ans ... mais en l'appelant autrement.
D'ailleurs, je me demande, maintenant que tu en parles, si monsieur Jourdain n'en faisait pas déjà.
Quel est l'objectif exact de ta recherche? As-tu des valeurs à mettre sur ton schéma? P du moteur? Tensions d'alimentation? Valeurs de résistances? Modèles des transistors?
Une photo de cet étage de puissance serait un élément intéressant.
Je persiste, quant à moi, à 100%, que c'est du tout ou rien, de la commutation avec saturation des interrupteurs. Ma certitude n'est pas dogmatique, mais se base simplement sur ton schéma, seul élément concret actuel.
J'en ai entendu parler pendant ma première formation en 1974 . . .
Comme beaucoup de techniques, elle a été inventée avant même de pouvoir la mettre en application.
La MLI a été "popularisée" avec l'avènement des mosfet fiables et pas chers.
Bonjour,
Il faudrait avoir le schéma complet, incluant la boucle de contre-réaction, pour pouvoir aller plus loin.
Ainsi que les données sur le moteur (en particulier son courant de fonctionnement).
Quant aux valeurs des composants :
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Bonjour,
Je vous met la boucle complète rapidement.
Concernant la tout ou rien je n'ai aucune raison d'être dogmatique, peu m'importe la techno utilisée du moment que je pige le principe.
Mais il faudrait qu'une modulation soit effectuée en amont, non ?
Pour les caractéristiques du moteur j'ai bien peur ne ne pas avoir les infos...
Quel est l'objectif de la démarche? Est-ce pour un cas concret ou simplement "pour le principe"?
Si c'est dans le cadre d'un asservissement, c'est obligatoire. Le taux de modulation c'est le seul moyen de faire varier la vitesse du moteur. Mais ce peut être synchrone du secteur ou au contraire, complètement asynchrone, à partir du continu. Si le moteur est "puissant", c'est forcément synchrone du secteur.
Ce n'est donc pas un cas concret, et donc, pas question de pouvoir avoir la moindre photo. Cela pourrait, pourtant, situer les choses. Le même synoptique est valable pour des moteurs de moins du watt à plusieurs kilowatts.
Pour la question du concret, c'en est dans le sens ou c'est du matériel existant, et ça n'en est pas dans le sens ou je n'ai pas la main sur le matériel (je suis plutôt coté modélisation), donc pas de photos malheureusement, et des informations un peu éparpillées.
Au niveau de la démarche, je souhaite modéliser ça un peu finement pour observer l'effet des défauts / non-linéarités (transistors, diodes) sur le comportement macroscopique du servomécanisme.
Pour la modulation, je confirme qu'il n'y en a pas.
Pour le schéma complété, le voici le voilà.
T0 est un 2N2222, T1 et T2 sont des 2N6042 et 2N6045. Pour la diode, j'ai du mal à lire la référence, ça fini par 4146.
Pour l'alimentation, c'est du 25V.
Pour le moteur, à la grosse, je dirais 100W (5A*20V).
ça me semble donc être un asservissement linéaire, avec contrôle de couple....( version 1970)
le SMOG se lève un peu
Tout à fait
il aura fallu 37 messages , pour qu'on puisse comprendre...
en décortiquant un peu , je continue à ne pas m'expliquer la présence de deux transos dans la branche de puissance.
SAUF SI , c'est une "pirouette" pour répartir la dissipation , compte tenu des possibilités
des composant disponibles alors.
Ben t'as pas tout lu.
Bonsoir,
Je me permet de revenir sur les explications d'Antoane concernant le fonctionnement des transistors (qui, au passage, m'ont pas mal permis d'avancer, merci ! C'est vraiment la compréhension du fonctionnement d'un transistor qui me bloque).
Lorsque le courant collecteur d'un transistor est inférieur à βIb, cela signifie t-il que le transistor est en saturation ? Quel impact cela a t'il sur les tensions Vbe et Vce ?
Merci d'avance
Bonjour,
Oui, ça peut d'ailleurs être vu comme une définition de la saturation.
Dans le domaine βIb=Ic, le transistor fonctionne en générateur de courant : quelle que soit la tension Vce appliquée (disons entre ~1V et une tension ne détruisant pas le composant), le courant de collecteur est fixé par le courant de base.
Dans le cas où le circuit externe n'arrive pas à fournir tout le courant que pourrait laisser passer le transistor en accord avec βIb=Ic, celui-ci se comporte comme une source de tension, imposant Vce=Vce_sat (~200mV pour les petits transistors de signal).
Vbe est n'est (quasiment) pas fonction de Ic.
Ce n'est pas nécessairement facile à lire, mais tu peux regarder les courbes typiques données dans les datasheets de transistors, tu veras ce genre de comportement, ainsi que, par exemple, la variation de β avec (Ic, Vce).
La tension Vce_sat dépend aussi fortement de la géométrie du transistor et de ce pourquoi il a été optimisé : tenue en tension, vitesse, faible Vce_sat... Il peut ainsi varier entre quelque chose comme 50mV et >1V.
:depseul:
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Ok,
Donc, dans mon cas, en fonctionnement normal, l'un des deux transistor de puissance sera saturé en permanence, et l'autre en régime linéaire.
Et si l'on augmente trop la commande en couple, le courant moteur croit, donc la chute de tension aux bornes du moteur augmente (via la résistance moteur), faisant saturer le deuxième transistor par diminution de sa tension Vce à la valeur de saturation.
J'ai bon ?
si le courant moteur croît ( avec un ^) , l'info est renvoyée sur le premier AOP par la résistance SHUNT
Et qu'advient-il alors ?
la boucle d'asservissement agit :
la tension de commande est diminuée par le second AOP,
et réduit donc l'alim du moteur.
c'est un montage plus casse-tête qu'il n'y parait
Mais j'avais dit "si l'on augmente trop la commande en couple", donc justement si la boucle d'asservissement agit, cela conduit à avoir un courant moteur, et donc une chute de tension, faisant saturer le deuxième transistor, non ?
courant moteur élevé, pardon
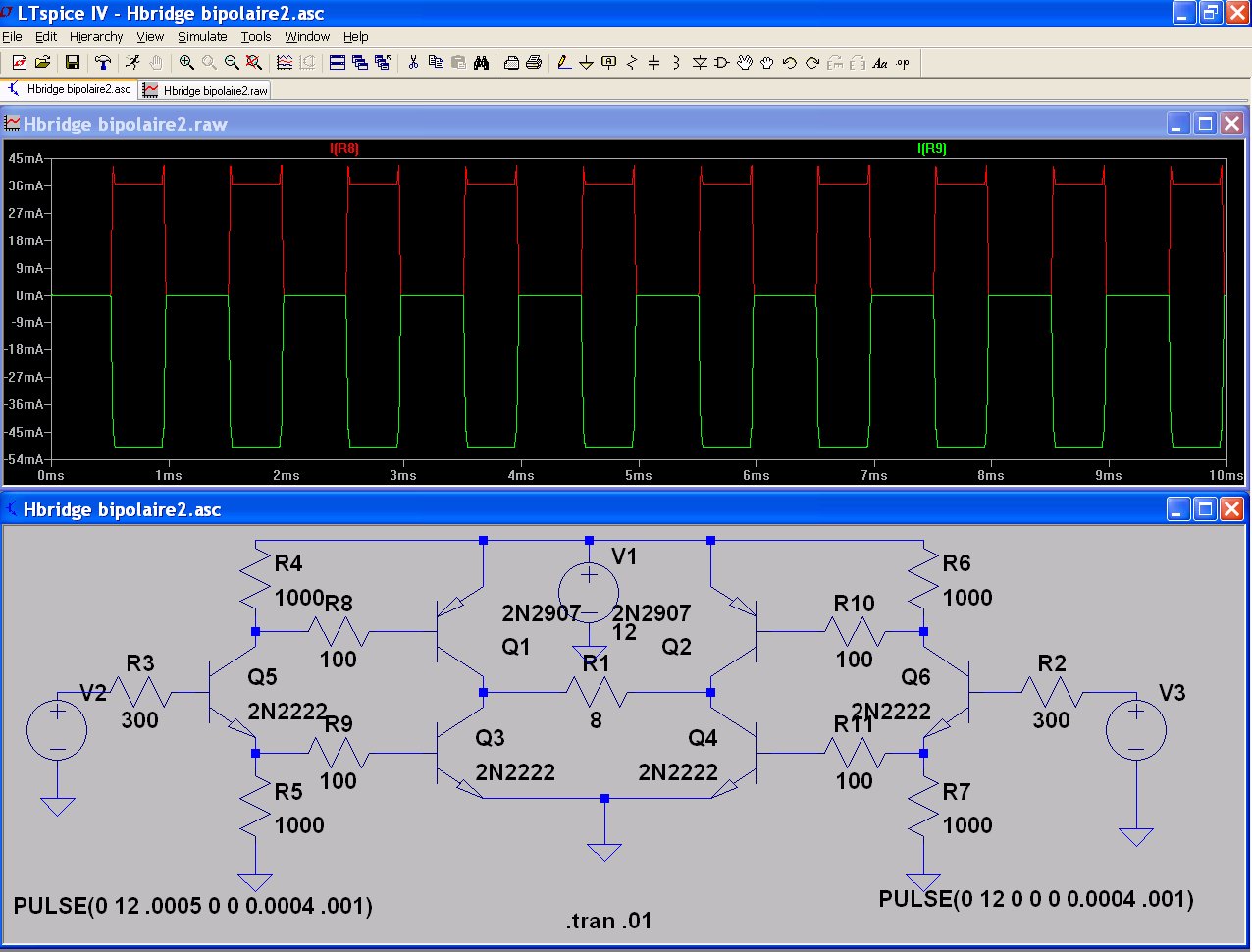
J'ai essayé de faire une simulation d'un pont en H comme celui présenté dans ce fil, mais ça n'a pas l'air de fonctionner du tout.IBASEH.jpg
Voici les courants de base des deux transistors de gauche. Bien en opposition de phase comme prévu.
Et voici les courants d'émetteur. Les deux transistors de gauche conduisent en même temps. C'est ce que l'on appelle un shoot-through. Aucun courant ne circule dans la résistance de 8 Ohms.
IEMEH.jpg
Un civet, un plat de côtes et puis, glissez-moi une petite paupiette avec.( Lino Ventura)
À CE PROPOS ! l"entrée négative de premier AOP est reliée directement à la masse...
ce qui me fait douter de l'utilité de la résistance de contre-réaction de 300 K
car dans ce cas l'AOP est en boucle ouverte
le shéma a-t'il été bien relevé ?
Je ne suis pas sur de comprendre.
Si l'on calcul la tension en sortie de l'AOP, en appelant Ue et Ur les tensions d'entrée et de mesure, on a : Us =0.5*(Ue+Ur)*(300e3+10e3)/300e3=15.5*(Ue+Ur)
J'ai fait une erreur ?
D'où l'intérêt de "normaliser" les schémas (+V en haut, 0V en bas) !
voui , et l'alim des AOP n'est pas spécifiée.....
bref , y'a encore des zones d'ombres
Pour la simulation d'Yvan, n'est-ce pas un problème de mauvaise polarisation ?
Lorsque je simule l'amplification en boucle ouverte, pour que ça fonctionne, il faut que j'ajoute en entrée un offset de tension égale à la somme des tensions base émetteur de T0 et T2 (ou T1).
oui , puisquil n'y a pas de contre réaction : l'entrée "-" étant à la masse comme dit plus haut
le gain de l'étage est donc celui de l'AOP en boucle ouverte
Je n'ai toujours pas compris : en quoi c'est un problème que l'entrée + soit reliée à la masse
Il y a bien une contre réaction puisque le second AOP inverse le signal.
(Du coup c'est -Ue qui est asservi, il s'agit de la partie négative)
pas convaincu
bref , c'est fichtrement capillotracté ce truc !


{kind=link}
{kind=link}