


Bonjour,
Je reviens vers vous dans le cadre de mon projet universitaire sur le smart wheel balance (skate board auto-balancé).
Pour résumer le projet : C'est un skate électrique sur lequel l'utilisateur peu avancer ou reculer en fonction de l'inclinaison de la plate-forme. La vitesse varie en fonction de l'inclinaison des plate-formes articulé.
Dans ceux-ci se trouve un accéléromètre et un gyroscope. Mon soucis est pour qu'il ait rotation, il faut qu'un détecteur photoélectrique à fourche soit coupé (utilisateur sur le système).
Je souhaiterai savoir si la transmission d'informations d'un gyroscope et accéléromètre vers un contrôleur peut être coupé par un optocoupleur ? Car je sais qu'un optocoupleur sert principalement à séparer la partie commande de la partie puissance par isolation galvanique.
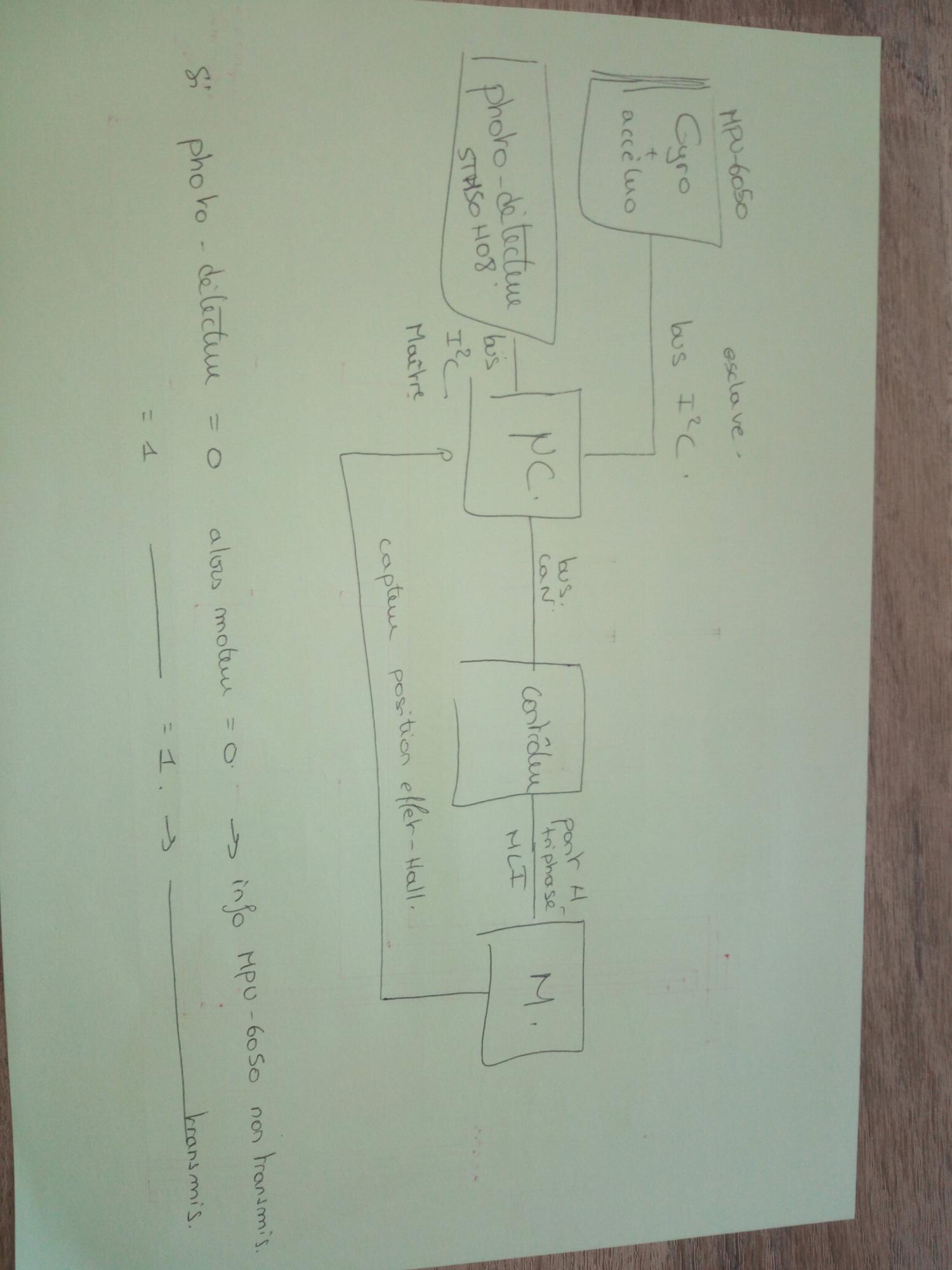
Je joins le schéma fonctionnel du système.
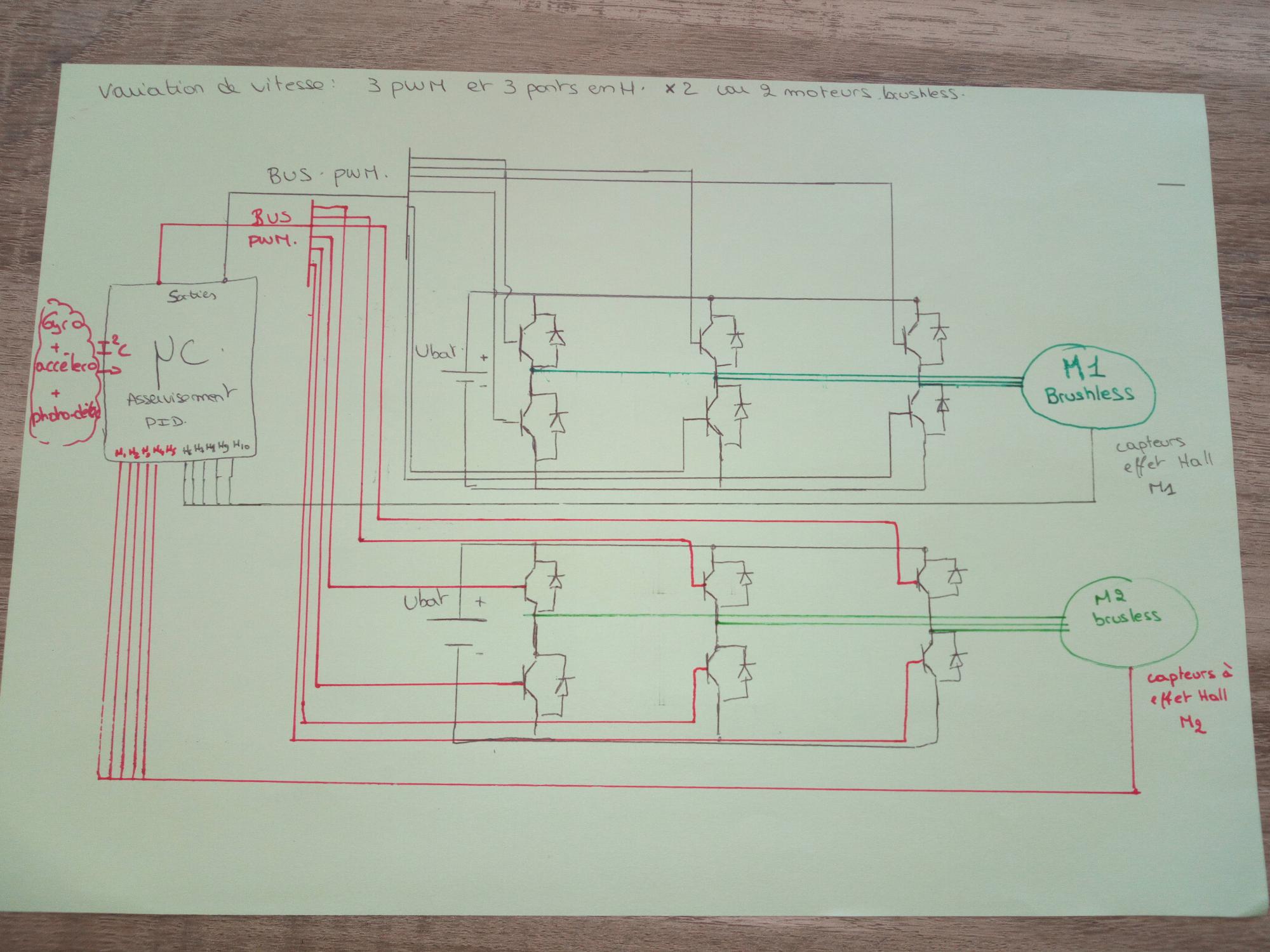
L'accéléromètre gyroscopique à sur la puce, un processeur de mouvement numérique embarqué Digital Motion Processor (DMP) qui calcul l'angle. Les informations d'angles sont envoyées au contrôleur, ce dernier commandera par un signal MLI les transistors du pont en H du moteur brushless pour faire varier la vitesse et retrouver un angle nul (principe du pendule inversé).
Je suis novice dans l'électronique et j'ai du mal à visualiser le cheminement de l'ensemble ...
Récupération des paramètres physiques du système (gyro+accéléro) --> Microprocesseur --> Optocoupleur --> Contrôleur (asservissement PID) --> Signal MLI vers pont en H --> Moteur ?
Merci pour vos futurs réponses

-----

 ? (LED + phototransistor)
? (LED + phototransistor) 


 :
: 
{kind=link}
{kind=link}