ok donc la présence d'une résistance de tirage haut.Envoyé par jiherve

par contre pour moi il faut utiliser indépendamment alert 1 et alert 2
-----

ok donc la présence d'une résistance de tirage haut.
par contre pour moi il faut utiliser indépendamment alert 1 et alert 2
ok merci de ces précisions
bonjour une détection hard avec bascule au VIH de la porte logique, +28V sur V1 après le shunt sur V2. on peut rajouter un potard pour régler le seuil de détection 10 à 15A par exemple avec le choix des bonnes valeurs de résistances ?
au démarrage on ne balance pas un PWM à 99% mais avec une rampe lente par exemple 2 à 3 s en partant de 0%.
choisir un bon AOP peut être qu'un simple LM324 pourrait convenir si cela ne gène pas le INA226 ?
VS = 1/R'1[V2R2(R'1+R'2)/(R2+R1)-V1R'2]
R'1 à la place de R1 et R'2 à la place de R2 sur la maille V1 Vs (branche du haut).
http://electronique.aop.free.fr/AOP_...plidiff_1.html
=> circuit similaire proposé par Antoane :
C'est ce que je fais : ma porte A correspond à ton A1 ; B à ton A2, R58 à ton R1 et R59 à ton R2, mais c'est vrai, ma désignation en bascule est inappropriée ; c'est de l'auto-verrouillage.
Je sais bien que cet auto-verrouillage peut être fait via le INA (LEN=1), mais je préfère une solution "hard" via le CD4001 et SW3, d'autant que je verrouille à OFF les 2 ponts, quel que soit le 'Alert' activé.
=> Alim Vs max à 5v5 :
A priori, on est d'accord, avec Vs=5v, ça passe.
=> tirages en entrées DIS (HIP) :
Ces entrées sont pilotées directement par la sortie logique (porte C) : je ne vois toujours pas pourquoi on aurait besoin d'une résistance de tirage sur ces entrées... elles ne voient qu'un état haut (pont H sur OFF) OU bas (pont H opérationnels), non ?
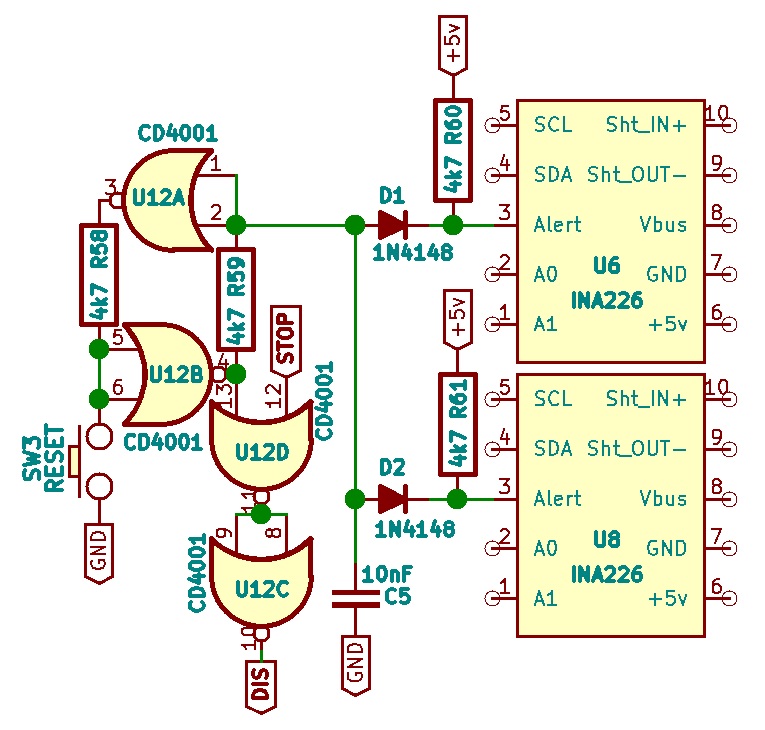
=> Couplage des sorties 'Alert' (INA) :
C'est clair, ce sont des Open Drain Output, et au datasheet elles ont un pull-up ; je compte laisser les settings LEN et APOL par défaut (=0) ; donc pas de latch, et actives à niveau Bas.
Mais là je suis un peu perdu avec vos remarques et la question de leur couplage en commun demeure :
---> mises en commun directement sur les entrées 1 et 2 de la porte logique A ?
ou
---> séparées comme ci-dessous ?
Que conseillez-vous ?
=> Etat STOP commun aux 2 ponts H :
Son état n'est pas liée à une consommation ampèremétrique aux INA, mais à la mise à 0 des 2 PWM ensemble.
Il reste verrouillé via le soft jusqu'à une nouvelle commande O/F du portail, qui seule peut le déverrouiller.
En espérant que ce soit plus clair.
A+
Dernière modification par RATAXES64 ; 02/02/2025 à 15h35.
OUPS!
Erreur de fichier joint : il manque la liaison vers l'entrée 'Alert' du PIC
la fermeture des portes n'est pas simultanée il y a une porte avant l'autre et l'ouverture c'est pareil.
relier ensemble les alert je ne pige pas !
pour moi c'est une gestion par moteur avec le contrôle du courant par moteur on ne stoppe pas le moteur A si le surcourant c'est sur le moteur B.
Il vaut mieux arrêter les deux, au cas où un morpion viendrait se fourvoyer quelque part.
L'électronique c'est comme le violon. Soit on joue juste, soit on joue tzigane . . .
C'est pourquoi j'indique qu'ils sont similairesC'est ce que je fais : ma porte A correspond à ton A1 ; B à ton A2, R58 à ton R1 et R59 à ton R2, mais c'est vrai, ma désignation en bascule est inappropriée ; c'est de l'auto-verrouillage.
Je sais bien que cet auto-verrouillage peut être fait via le INA (LEN=1), mais je préfère une solution "hard" via le CD4001 et SW3, d'autant que je verrouille à OFF les 2 ponts, quel que soit le 'Alert' activé.
Une différence est qu'avec seulement 2 inverseurs et une GPIO de MCU, on a control complet du circuit.
Dans ton circuit, Alert utilisé comme sortie du MCU et STOP sont (à peu près) redondants.
Ca va dépendre de l'usage qui est fait de ce flag :pour moi c'est une gestion par moteur avec le contrôle du courant par moteur on ne stoppe pas le moteur A si le surcourant c'est sur le moteur B.
- si ce n'est qu'une sécurité, il est suffisant de n'avoir qu'un circuit : en cas de problème, on peut accepter de tout couper, et de necessiter un RESET manuel.
- si c'est utilisé en fonctionnement normal (eg detection de buté ferée), alors effectievement on pourra vouloir des circuits séparés et un reset par MCU.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
comment il va gerer la fermeture de son portail comment il détecte que la porte est bien en butée fermée etc...
à lui de nous dire ce qu'il compte faire
Moi ça n'est pas un morpion, mais une couleuvre qui s'est insinuée dans l'armoire électrique via un passe-câble, qui m'a tout fait péter, et c'est sans compter les lézards, et autre punaises, nids de frelons, araignées, j'en passe !.
=> avec seulement 2 inverseurs et une GPIO de MCU :
Euh, il faut aussi récupérer l'info STOP vers DIS : on a besoin d'un 'OU'.
=> Alert utilisé comme sortie du MCU et STOP sont (à peu près) redondants :
Oui, à peu près... comme je le détaille ci-après
Exploitation de Alert :
C'est une sécurité globale pour une consommation excessive hors limite de la gestion Moteurs, quelle qu'en soit la cause.
Son seuil est fixe et mis 'en dur' dans les INA (10A par INA).
Dans un tel cas, l'état est verrouillé par la logique CD4001 (+visualisation sur la carte par led). Toutefois, cette info est aussi fournie au PIC pour une transmission extérieures BT via le HC05. En état Alert verrouillé Low, les ponts H sont définitivement OFF jusqu'au RESET après intervention.
Cette exploitation des Alert peut effectivement être remplacée par une sécurisation "hard" par AOP.
Exploitation de DIS :
A l'état Haut, les ponts H sont OFF. Cette situation peut être provoquée :
-> Soit par Alert activé (Etat verrouillé suite à consommation hors limite)
-> Soit par STOP Activé :
- Soit quand les PWM sont nulles (Etats 'stable' O ou F du portail, donc non verrouillé)
- Soit au déclenchement des palpeurs d'obstacles (mise à l'arrêt du portail, avec alarme : nécessite une levée d'alarme)
Analyse de la consommation (dans la limite de 10A) :
C'est via la liaison SCL/SDA que ça se passe, et c'est le soft du PIC qui gère les PWM's appliquées à chaque vantail en conséquence.
Avec les 2 PWM nulles => STOP activé : une commande O/F peut être prise en compte (hors Alert)
2A<I<4A : Rampe de démarrage (Action première came),
4A<I<6A : puis vitesse normale,
2A<I<4A : puis ralentissement (action 2ème came).
6A<I<8A : puis mise en butée (PWM concernée coupée à 8A),
Avec les 2 PWM nulles => STOP activé : une commande O/F peut être prise en compte (hors Alert)
Cela répond-t-il à vos interrogations ?
A+
Dernière modification par RATAXES64 ; 02/02/2025 à 18h47.
Bonsoir,
Le montage que je propose me semble également remplir toutes ces fonctions.
Il permet de bloquer les ponts (MCU = 1), de reseter la mémoire (MCU = 1) ou de lire l'état de DIS (MCU configuré en entrée).
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
non je ne vois pas quel porte se ferme en 1er...
visiblement un portail à battant il y a un ordre à respecter sur l'ouverture et la fermeture.
visiblement personne n'a pigé que j'indique que la séparation des alert est utile pour gerer chaque porte de facon indépendante.
mais je ne vais pas le dire 510 fois.
faites comme vous voulez ...
sinon y aura t'il une gestion manuel de l'ouverture et la fermeture en cas de défaillance de la télécommande HF ?
C'est fixé dans le soft ; ce sera toujours le Moteur 1 en premier. Il pourra indifféremment être affecté au vantail droit, ou gauche par câblage approprié (moteur et switches de ses 2 cames axiales).
Oui, selon la position du switch 'Mode', le décalage entre les deux vantaux est géré par le soft, via les infos des contacts aux cames du vantail opposé. .
Non, Alert ne gère pas les mouvements des vantaux ; c'est seulement une sécurité globale de surcharge ampèremétrique hors limite, comme le ferait la solution AOP proposée.
Oui, il y en a même plusieurs :
> Electriquement : Poussoir de secours, commande Portier, Clavier à codes, Lecteur de badges, appli BT via le HC05
> Mécaniquement : par clés spéciales et câbles de déverrouillage.
C'est volontairement que je n'ai pas détaillé toutes les fonctions conditionnelles qui sont gérées par le PIC pour rester axé sur la gestion des NMOS par les HIP et les INA, car elles sont TRES nombreuses. J'espère quand même avoir répondu clairement.
Restent mes 2 questions précédentes :
=> tirages en entrées DIS (HIP) :
En tant qu'entrées, elles peuvent être mises en commun, et sont pilotées directement par la sortie logique (porte C).
Elles voient donc toujours :
-> soit un état Haut (pont H sur OFF),
-> soit un état Bas (pont H opérationnels)
Dès lors, pourquoi un tirage ?
=> Couplage des sorties 'Alert' (INA) ; que faire :
---> mises en commun directement sur les entrées 1 et 2 de la porte logique A ?
ou
---> séparées comme sur mon schéma #125 ?
Merci à vous.
c'est la où je ne comprends pas la détection en butée 8A sera faite comment ?
Bonjour,
> Non, Alert ne gère pas les mouvements des vantaux ; c'est seulement une sécurité globale de surcharge ampèremétrique hors limite, comme le ferait la solution AOP proposée.
Dans ce cas, tu peux te contenter de les paralléliser comme prévu initialement. Les portes réalisent une mémoire, il ne faut donc pas de pull-up additionelle (il y en a une en trop sur le schéma #113, comme indiqué en #117). Je ne suis pas sûr de l'interet du condensateur C5.
DIS étant directement controlé par une sortie de circuit CD4000 (4001, 40106, 4069 ou autre), pas besoin de tirage additionnel.
@Racard : le INA sert avant tout à mesurer le courant, via sa sortie I2C. La sortie Alert est une protection supplémentaire semi-hard, qui ne devrait (presque) jamais servir.
Dernière modification par Antoane ; 03/02/2025 à 08h44.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
bonjour merci de ces précisions antoane donc alert c'est du hard à 100% une fois que le registre est paramétré...
okok
donc la gestion des moteurs sera fait indépendamment en lisant régulièrement le courant de chaque moteur et un ordre de stop sera envoyé si la porte est en butée okok...
je m'interroge sur la lecteur du courant avec un pwm à 99% cela ne sera pas genant pour l'ina ?
OK Antoane : Les sorties Alert sont communes, et les entrées DIS aussi
Côté des sorties 'Alert' : connexions directes en entrée(s) porte logique A (Exit les diodes D1 et D2, les tirages R60 et R61, sans oublier celui indiqué en Pin11 du PIC).
Côté des entrées 'DIS' : connexions directes en sortie porte logique C (pas de tirage !).
Moi aussi, racard, je m'interroge...
Maintenant que le schéma est validé sur les étages de puissance, je vais maquetter et faire des essais réels avec un de mes moteurs, pour 'caler' les paramétrages de la PWM (Hz & %).
Je croise les doigts... et garde confiance.
Après, il y aura aussi l'impact du temps de (des) boucle (s) 'do' du soft ...
Mais step by step...
En tout cas, merci encore à tous.
A suivre...
autant ina226 par pont ok .
ah non je ne suis pas d'accord du tout dis doit être pour chaque pont ! donc ne pas relier ensemble !
pourquoi ?
car si une porte commence la fermeture avant l'autre par exemple 2 s.
elle arrive en butée on stop le pont de la 1ere porte mais l'autre porte elle continue sa fermeture.
dis par pont.
sinon à quoi sert DIS ?
Détaillons :
1) Quand le premier vantail (1) arrive en butée (1), sa PWM (1) est stoppée quand I1 (via bus I2C de INA 1) atteint 8A. (STOP laissé inactif à Low)
2) Quand le deuxième vantail (2) arrive en butée (2), sa PWM (2) est stoppée quand I2 (via bus I2C de INA 2) atteint 8A. (STOP laissé inactif à Low)
3) Quand les deux PWM 1&2 sont stoppées (à 0), là, la sortie STOP est activée (niveau Haut) :
=> Une commande O/F du portail peut alors être à nouveau prise en compte.
=> Les 2 ponts H sont bloqués (les 2 DIS à l'état Haut) dans l'attente d'une nouvelle commande
Effectivement, le fait d'ajouter l'état STOP aux 2 DIS parait superflu dans la mesure où les PWM étant à OFF, les ponts sont déjà 'inactifs' : Toujours mon penchant ceinture & bretelles...
A+
> Effectivement, le fait d'ajouter l'état STOP aux 2 DIS parait superflu dans la mesure où les PWM étant à OFF, les ponts sont déjà 'inactifs' : Toujours mon penchant ceinture & bretelles...
D'autant plus que "Alert" peut être utilisé comme sortie pour forcer le blocage des ponts via DIS.
Par contre, il me semble me rendre compte maintenant qu'il y a un inverseur de trop dans la chaine :
En cas de sur-courant, la sortie Alert du INA passe à zéro,
Donc la sortie de U12A passe à 1,
Donc la sortie de U12B passe à 0,
Donc, supposant STOP = 0, la sortie de U12D passe à 1
Donc la sortie de U12C, i.e. DIS, passe à 0 et on rend le pont fonctionnel.
Ou bien je rate qqch ?
D'ailleurs, il n'y a qu'un étage inverseur (ie. globalement inverseur) entre Alert et DIS dans mon schéma 117, contre 4 (ie. globalement non-inverseur) dans le tient.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
J'espère ne pas me rater...
> En cas de sur-courant, la sortie Alert du INA passe à zéro => Oui (appliqué aux entrées de U12A)
> Donc la sortie de U12A passe à 1 => Oui (premier inverseur) et elle attaque une des entrées de U12D
> Donc la sortie de U12B passe à 0 => Oui (deuxième inverseur) et verrouille l'état
=> Pour U12D, la table 'OU' s'applique :
STOP à 1 OU Sortie U12A à 1 => La sortie U12D passe à 0 (table porte 'OU')
Donc la sortie U12C passe à 1 (troisième inverseur) et les ponts sont bloqués (DIS à 1)
Si STOP à 0 et Alert à 1, les ponts sont libres.
> Donc, supposant STOP = 0, la sortie de U12D passe à 1 => Oui...MAIS ... uniquement si Alert à 1, donc sortie U12A à 0 !
> Donc la sortie de U12C, i.e. DIS, passe à 0 et on rend le pont fonctionnel. => Oui pour Alert à 1 et STOP à 0
On est d'accord ?
A+
Les schémas 113 et 125 sont différents, c'est pourquoi ca m'avait pas choqué initialement.
#113 est ok (trois inverseurs dans la boucle, donc glöbalement inverseur - comme mon schéma).
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
tout à fait U12B passe à 0 et on est cuit car il y a une résistance de rappel haut à coté du pic sur le net ALERT donc on se retrouve à VCC/2 montage très instable lorsque alertina repasse à 1 ...
et on fait comment pour récupérer alert(net) à 1 après la disparition des alert ina ?==> à revoir ce montage 125 je suis d'accord avec antoane le montage 113 est ok.
DIS= stop+U12B = stop + alert(net)
je vois un pb de conversion pour mesurer le courant avec le hacheur à 50% pwm on mesurera que I/2 même lorsqu'il sera à 99% on pourrait aussi mesurer une valeur incorrecte compte tenu du temps de conversion.
il faudrait rajouter un filtre moyenneur comme sur le schéma p14 : https://www.ti.com/lit/ds/symlink/in...oogle.com%252F
quel sera la fréquence de découpage du PWM ? 20khz 10khz ?
mettre le shunt dans la maille du moteur évitera cette erreur de conversion.
Bonjour,
racard > #143 : on est cuit car il y a une résistance de rappel haut à coté du pic sur le net ALERT ;
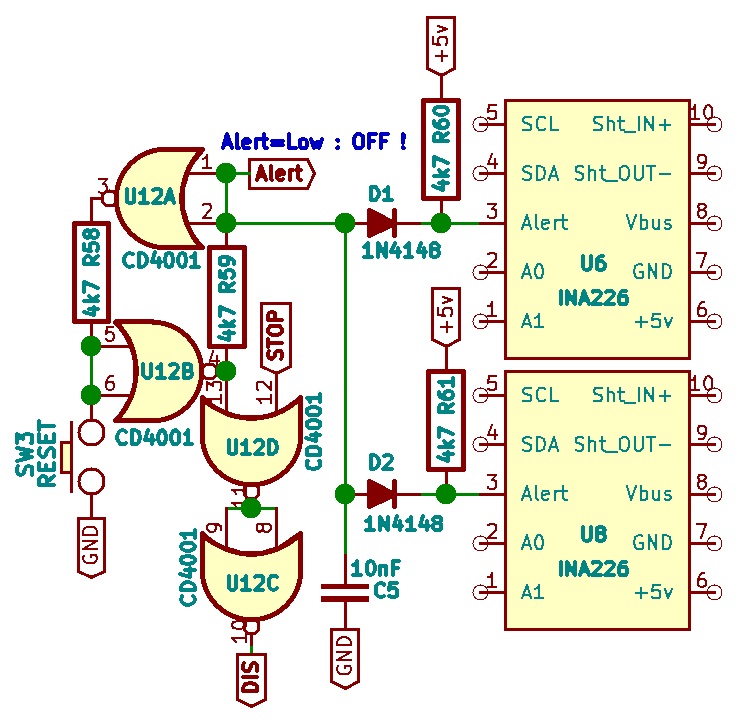
=> Oui, le schéma #125 est faux, et non retenu.
Antoane en #135 indiquait : il ne faut donc pas de pull-up additionnel (il y en a une en trop sur le schéma...)
En #137, J'indique : Exit les diodes D1 et D2, les tirages R60 et R61, sans oublier celui indiqué en Pin11 du PIC)
J'aurai dû joindre le schéma final corrigé... sans les diodes et les tirages, que voici : Schéma Final.pdf
racard > mettre le shunt dans la maille du moteur ; je ne vois pas à quoi cela correspond : Mon shunt est-il mal placé ?
Concernant la fréquence, je n'ai pas encore fait mes essais réels : il est probable que ça devrait tourner autour de 10kHz.
J'avoue ne pas maîtriser l'INA que je n'ai jamais utilisé, et je sens que je vais bien galérer pour le serrage en butée...
Je sais que le seul recours à des "fin de course", n'est pas une bonne solution.
Il faut ralentir le mouvement, et forcer raisonnablement une fois en butée.
J'espère que j'y verrai plus clair après mes essais.
A+
bonjour le courant dans le shunt tel qu'il est sera haché par le signal PWM, le convertisseur va donc voir une ddp qui ne sera pas constante.
mettre le shunt avec le moteur fait que le courant reste quasi constant (juste la décroissance de I lors des DRL passantes).
il faudra maitriser le soft c'est sûr avec ce convertisseur ina, moi j'aurai fait au plus simple AOP avec verrouillage avec bascule.
Dernière modification par racard ; 04/02/2025 à 09h12.
avant de faire fabriquer un pcb peut être faire un montage sur carte pour valider certaines partie ?
Je n'ai pas regardé en détails la datasheet de l'ADC, mais il semble constitué d'un ADC Sigma-Delta (16 bits, 500kHz de fréquence d'horloge) suivi d'un moyennage numérique (fenetre de 140 us à ~8 ms).
Je vois plusieurs facons de procéder, dont la faisabilité (liée à la controlabilité du composant) :
- Synchroniser l'acquisition de l'ADC avec le PWM, pour s'assurer que tous les échantillons sont pris lorsque le courant moteur circule dans le shunt (et non pendant la phase de roue-libre). Dans ce cas, on a en sortie du moyenneur numérique une valeur peu bruitée du courant circulant dans le moteur.
- Passer outre le moyenneur numérique, et directement récupérer le signal de sortie de l'ADC pour y lire le courant moteur.
- Utiliser le moyenneur numérique sur une périore >> la période du PWM, en "espérant" que la fréquence d'échantillonnage est sufisante pour que la sortie du moyenneur numérique donne une boone idée du courant moyen circulant dans le shunt. On en déduit le courant moteur en divisant connaissant le rapport cyclique.
On peut aussi extraire la valeur moyenne du courant moteur analogiquement, en filtrant analogiquement la tension aux bornes du shunt.
On peut ausi ajouter un sample & hold entre le shunt et l'ADC, synchronisé avec le PWM.
On peut aussi insérer un capteur directement en série avec le moteur, ou choisir un ADC sans moyenneur intégré, ou davantage paramétrable.
Si faisable, la première option est a priori la meilleure.
Changer l'ADC n'est sinon sans doute pas une mauvaise idée. On pourrait se contenter d'un simple high-side current sense amplifier - on en trouve des versions intégrées pour pas cher, certaines avec une sortie OCP (Over current protection), associé à l'ADC du MCU.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
> mettre le shunt avec le moteur: Mon shunt n'est donc pas correctement placé ? c'est ça que je ne pige pas... Un petit croquis serait bien venu.
> moi j'aurai fait au plus simple AOP : He, Il n'est pas exclu que j'en arrive à cette solution...si c'est trop la galère avec les INA
> faire un montage sur carte pour valider certaines parties : Absolument !
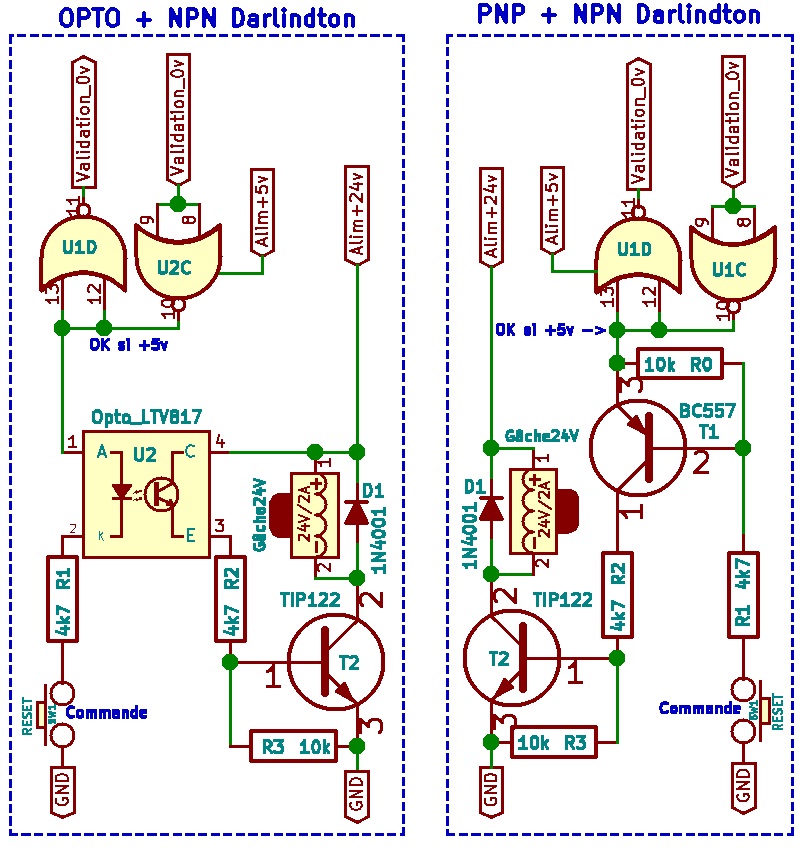
Par ailleurs je dois asservir la commande par poussoir à 0v d'une autre gâche 24v, en fonction d'un état haut présent entre 2 portes logiques (en 5V).
Je tourne un peu en rond avec les 2 options ci-jointes. Un avis ?
Merci.
je n'ai pas compris le pourquoi du comment des deux derniers schémas avec l'opto ...
fonctionnement en roue libre lire à partir de la page 19 pour comprendre PWM on mosfet ON en phase roue libre les DRL conduisent pour assurer la continuité dui courant dans le moteur.