

Bonsoir,
Je ne comprend pas très bien la notion de tenseur d'inertie.
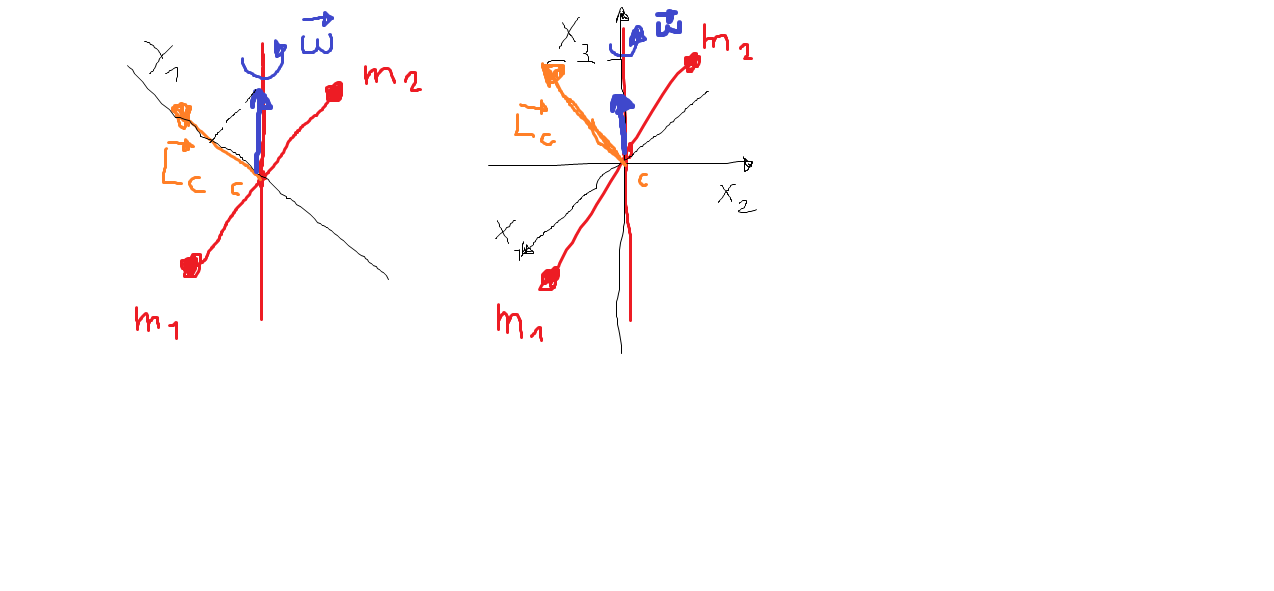
(i)Dans quel cas n'a t'on pas Lc=I1*w
Lc: projection du moment cinétique sur l'axe qui porte w
I1: mement d'inertie par rapport
w:vitesse angulaire du solide indéformable
(ii)En général, comment savoir si on a juste un moment d'inertie ou un tenseur d'inertie (ensuite, quand est ce que le tenseur est diagonale ou pas?)
(iii) Que signifient les termes en dehors de la diagonales?
En fait je suis un peu (pour pas dire totalement) embrouillé.
Merci d'avance.

-----

{kind=link}