

Bonjour,
Le capteur prend un angle (en degré, radian ou tour) et donne soit un nombre (numérique), soit une tension (analogique).
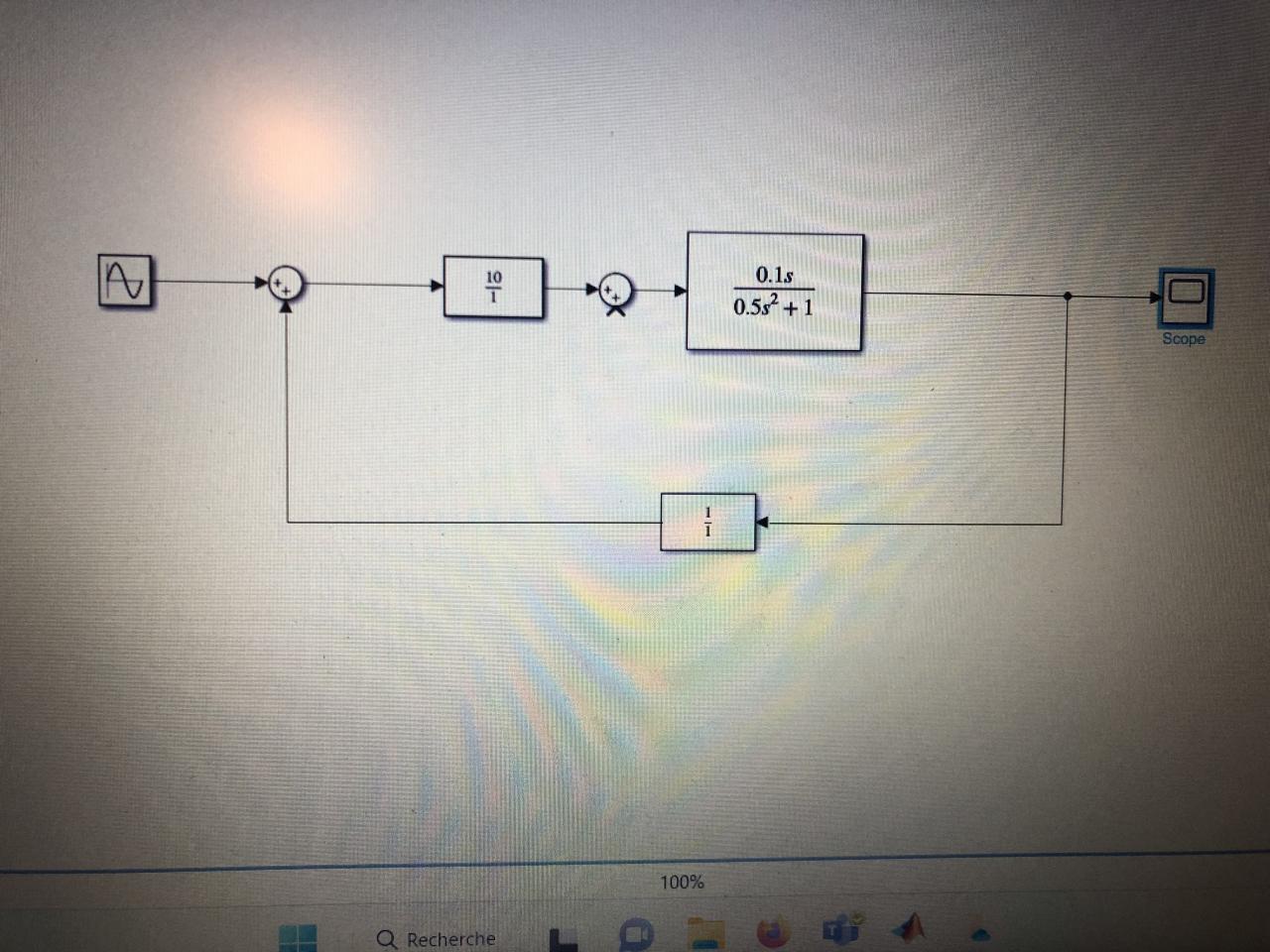
Cela met juste un gain kcapteur dans la chaine.
kcapteur= anglemesuré/angle
Si vous n'avez pas de contrainte technologique sur le capteur, le choix Kcapteur=1 est le plus simple et naturel.
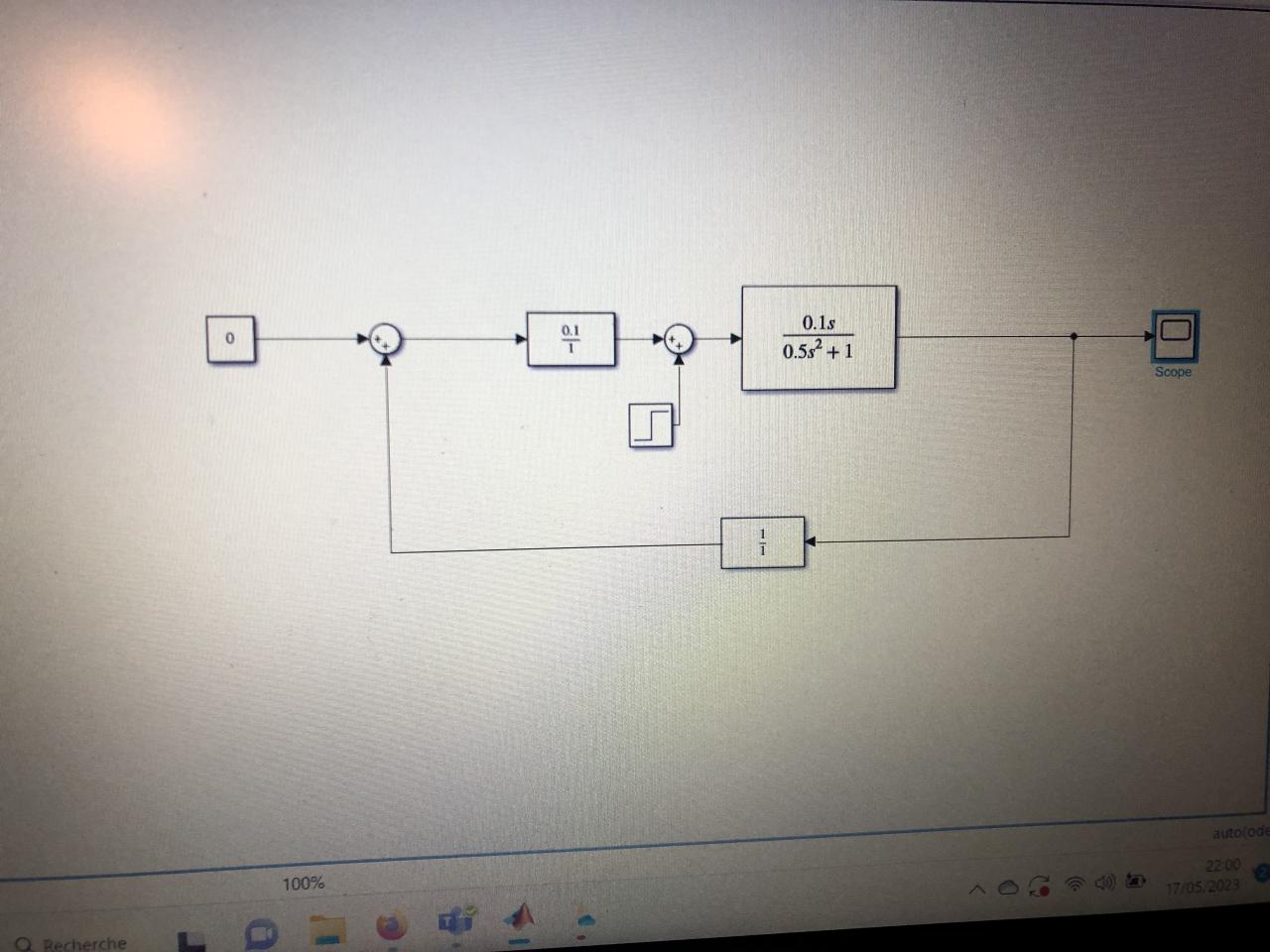
La perturbation de vitesse est ce que veut le grutier, cela peut être donné par un joystic, par exemple.
Son objectif est de déplacer la charge, donc d'avoir une vitesse non nulle de son chariot.
L'automatisme fait en sorte que l'angle reste le plus nul possible, tout en déplaçant le chariot comme le veut le grutier.
Cordialement
-----





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}