

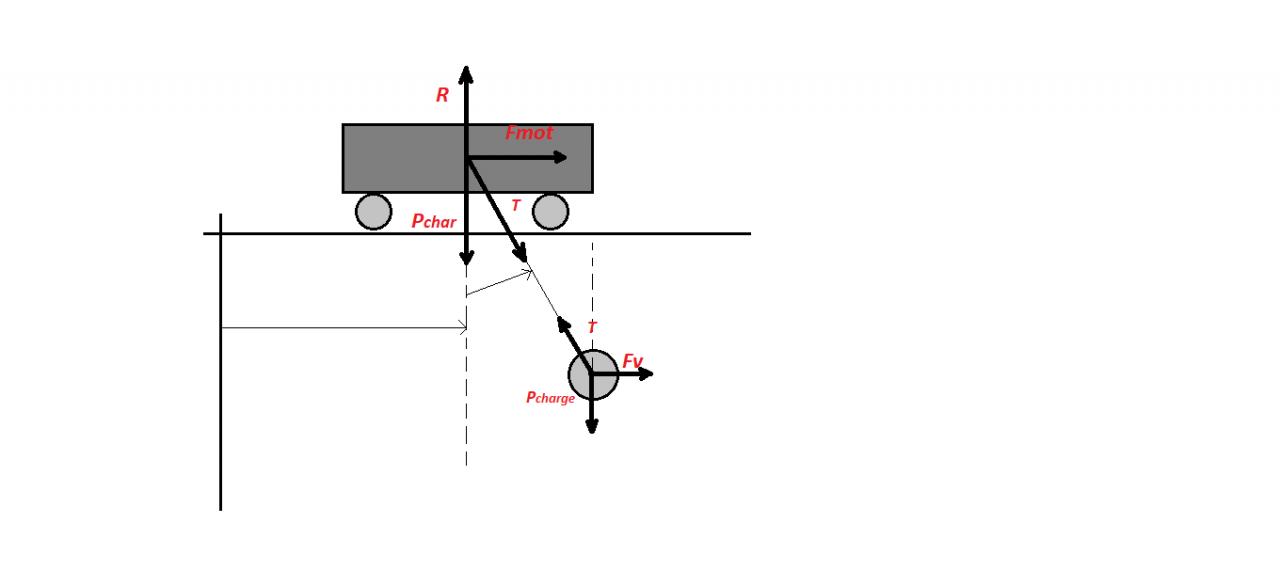
Ben vous faites le chariot de la grue avec la main qui tient la ficelle et vous montrez comment déplacer la boule avec un minimum d'oscillation (BF).
Quand vous ne bouger pas la main, vous montrez les oscillations permanentes de la boule (BO)
Après, pour faire mieux, il faut un peu de matériel.
M'enfin...
-----


{kind=link}
{kind=link}