Bonjour à tous,
je viens à vous dans l'espoir d'obtenir un peu d'aide pour mon tipe.
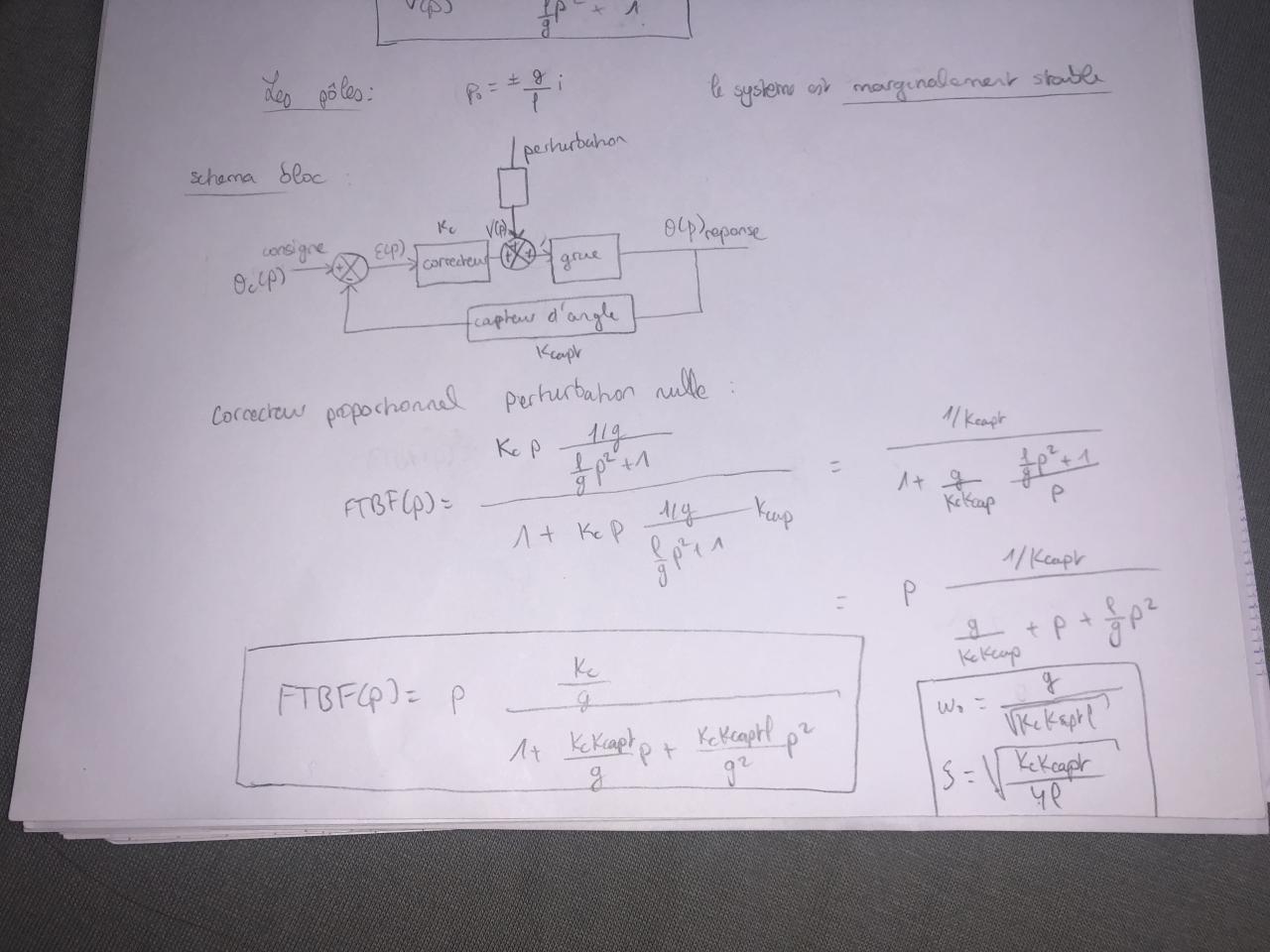
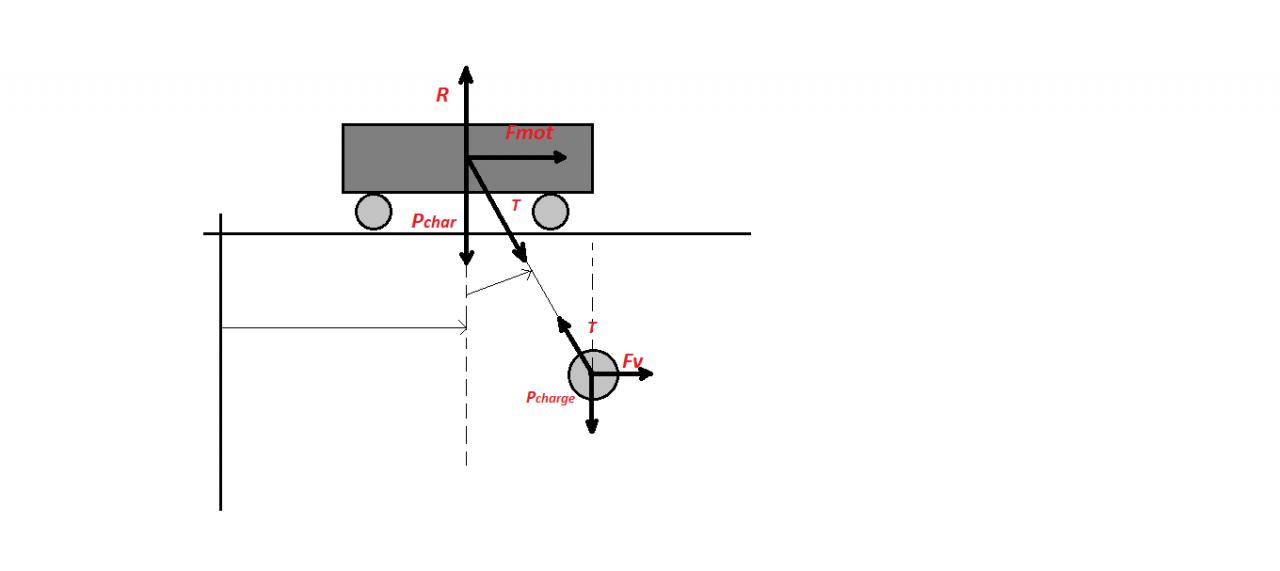
Notre but serait de limiter le déplacement angulaire du mouvement d'une charge lors de son déplacement, problème que l'on retrouve dans les grands entrepôts, cependant je n'arrive pas à trouver d'équation différentielle sur mon angle exploitable même sous python. J'ai pourtant essayé toutes les isolations possible, mais en considérant mon chariot comme parfait (vitesse constante) je ne trouve pas d'équation correcte ou exploitable. Sur un site de thèse on a pu trouver un sujet similaire utilisant le laplacien, cependant on nous a dit que cet opérateur était très loin de notre niveau, comment le retrouver ou le simplifier ? Notre expérience est quand à elle assez simple et nous ferons l'analyse de la trajectoire sous meca 3D.
N'hésitez pas à poser la moindre question ou le moindre conseil d'amélioration car c'est un projet qui nous intéresse beaucoup.
Ilian
-----