


Je vous explique mon problème pour mes ppe.
Je dois définir une stratégie de déplacement pour un robot qui à des dimensions de 30*30cm.
Ce robot doit recouvrir 90% d'une surface de 8*8m en 1h et recouvrir toute la surface en 24h.
Pourrais t'on m'aider pour définir la stratégie de déplacement, sachant que le robot se déplace à la surface de l'eau et qu'il a 2 moteurs.
Je n'ai aucune piste.
Merci de vos réponses.
Si vous avez besoin de détails n'hésitez pas.
-----


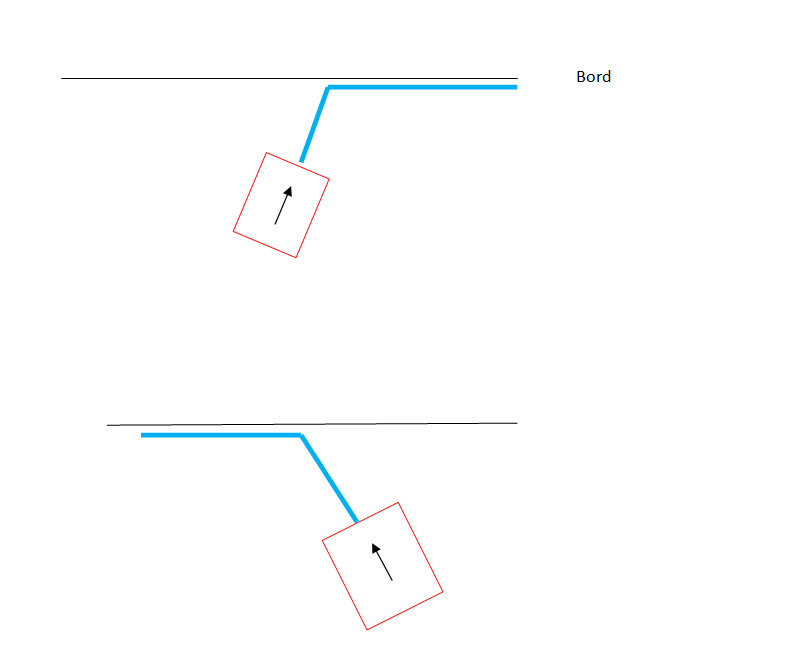 Je vous joint le schéma suivant que j'ai fait très rapidement pour expliquer.
Je vous joint le schéma suivant que j'ai fait très rapidement pour expliquer.