
Bonjour,Envoyé par Positron1

Merci de cette mise à jour
A voir peut être sur des forums de modélisme, deux modèles identiques devraient avoir les mêmes caractéristiques.
MM
-----

Bonjour,
Merci de cette mise à jour
A voir peut être sur des forums de modélisme, deux modèles identiques devraient avoir les mêmes caractéristiques.
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
C'est la moindre des chosesMerci de cette mise à jour
En faisant des recherches sur l'appairage des régulateurs, j'ai trouvé ceci:
J'ai posé la question au fournisseur sur la faisabilité, j'attends la réponse de confirmation
A suivre donc !
Le savoir des uns peut faire le bonheur des autres
Bonjour,
Ce que tu essayes de faire est identique aux commandes des moteurs de drones? Rien à voir de ce côté là ?
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Oui mais en plus simple, je n'ai que 2 moteurs les drones en ont au moins 4 et leur alimentation est gérée par tout un système, inclinomètre !, altimètre, direction et j'en passe !Ce que tu essayes de faire est identique aux commandes des moteurs de drones?
Je suis parti d'un avion bi moteur qu'on avait offert à mon neveu, le pauvre il l'a crashé au premier vol, je me suis demandé pourquoi, et après contrôle seul le moteur gauche était piloté, l' ampli droit était mort, d'origine ou à la première mise en route ? ! ce qui fait qu'il était impilotable
Comme j'ai fait du modélisme, je me suis dit qu'il serait amusant de piloter ce genre d'avion, et, ces moteurs peuvent équiper un bateau, tout aussi amusant à piloter
J'attends toujours mes réponses sur le module d'appairage, du fabricant et du fournisseur
Clt
Le savoir des uns peut faire le bonheur des autres
Salut,
Voilà des news-news
Réponse à la question sur l'appairage "C'est faisable avec un module "
je l'ai donc fait rentrer, j'ai testé, j'ai fait quelques modifs, c'est un peu mieux mais ce n'est pas parfait, j'ai toujours un moteur qui démarre avant l'autre, donc la rampe d'accélération est différente, je vais voir s'il est possible de me fournir une paire de moteurs + ESC semblables, je subodore que non mais !! si c'est oui, c'est que je devrais y arriver avec le module, ? ! C'est d'un compliqué !
Autre possibilité , 2 variateurs , 2 moteurs en continu avec capteur de rotation vers l'ampli, la boucle gérée par le PWM
Dommage mag1, ton mélangeur de signaux fonctionne très bien, j'ai modifié le Trim mais cela ne suffit pas , je n'ai pas suffisamment de réglage.
A plus pour d'autres résultats
Le savoir des uns peut faire le bonheur des autres
Bpnjour,
Merci pour ces nouvelles.
Il doit y avoir une solution puisque les drones ont 4 moteurs qu'il faut parfaitement synchroniser, mais je n'y connais rien, je ne fais qu'imaginer...
Je vois deux problèmes distincts : un moteur qui démarre avant l'autre et les rampes d'accélérations différentes. Pour les rampes, je ne vois pas d'autre solution que l'appairage des variateurs, mais pour le décalage des démarrages, on peut (peut être) ajouter un retard dans les commandes.
Quel est le temps entre les démarrages ?
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Tu imagines très bien !mais je n'y connais rien, je ne fais qu'imaginer...
Sur un drone, chaque moteur est contrôlé selon la direction, l'altitude indépendamment les uns des autres, en stationnaire, tous les moteurs reçoivent la même information, donc la même vitesse, si un des moteur perd de la vitesse la stabilité est corrigée par plus de jus ou c'est les autres moteur qui corrigent la trajectoire, etc.. (les feux de Versailles avaient des centaines de drones, Inimaginable il y a quelques années !)
C'est à tentermais pour le décalage des démarrages, on peut (peut être) ajouter un retard dans les commandes.
Je pense que c'est la cause, J'ai interverti moteur et contrôleur, je déplace le problème , lequel en cause, moteur ? contrôleur ? les deux ?un moteur qui démarre avant l'autre et les rampes d'accélérations différentes
J'ai posé la question s' il y avait dans la gamme de produits des régulateurs et moteurs appairésje ne vois pas d'autre solution que l'appairage des variateurs,
Voici des chiffres:Quel est le temps entre les démarrages ?
Signal mini = 1050 µs
Signal maxi = 2000 µs
Démarrage du second moteur 250 µs après pour arriver à la même vitesse, j'espère ! (Démarrage à 1300 µs)
Si tu peux quelque chose ? !!!
Merci
Le savoir des uns peut faire le bonheur des autres
Bonjour,
250µs, c'est pas beaucoup. C'est mesurable à l'oscillo, mais quel est l'effet réel ??
Sinon, actuellement, les commandes sont séquentielles, et il ne peut pas y avoir de superposition.
Une solution serait de traiter les commandes séparément, par deux 08M2. on pourrait alors les superposer en retardant une ou l'autre.
Il y aurait trois 08M2, un pour le mixage, un pour le servo droit, un autre pour le gauche, et un réglage de déphasage sur chaque pour pas faire de jaloux.
Les schéma ne serait ne serait pas beaucoup plus compliqué.
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Au sujet de régulateur/moteur, J'ai la réponse, la voici
Donc Je pense que je ne parviendrais au aucun résultat aussi, je vais mettre ces composants de coté et faire une autre étude citée ci dessus #125Après vérification, il n'existe pas de "couples appairés" ou de kits spécifiques vendus avec un moteur et un régulateur Pulsar B-20.
La gestion pourrait se faire par Picaxe, dans ce cas je me permettrais de te solliciter !
Le sujet n'est pas clos !! Papier, crayon, gomme, matière grise !!
Merci pour toutes tes interventions
Le savoir des uns peut faire le bonheur des autres
Hello,
Ok. A+
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Avant de prendre une autre voie, j'ai fait des recherches sur un site de modélisme et radio commande, là j'ai pu voir un avion quadri moteurs et tous semblaient tourner à la même vitesse et s'arrêtaient tous en même temps, donc je cherche à faire quelque chose qui existe déjà !! je prenais donc une mauvaise voies, je trouvais donc la marque des régulateurs afin d'en commander deux , reçus et testés, ça fonctionne mais !!! il y a un peu de différence. Comme j'avais du temps libre en attendant le matériel, j'attaqué une nouvelle étude et j'en a conclus que ce qui suit
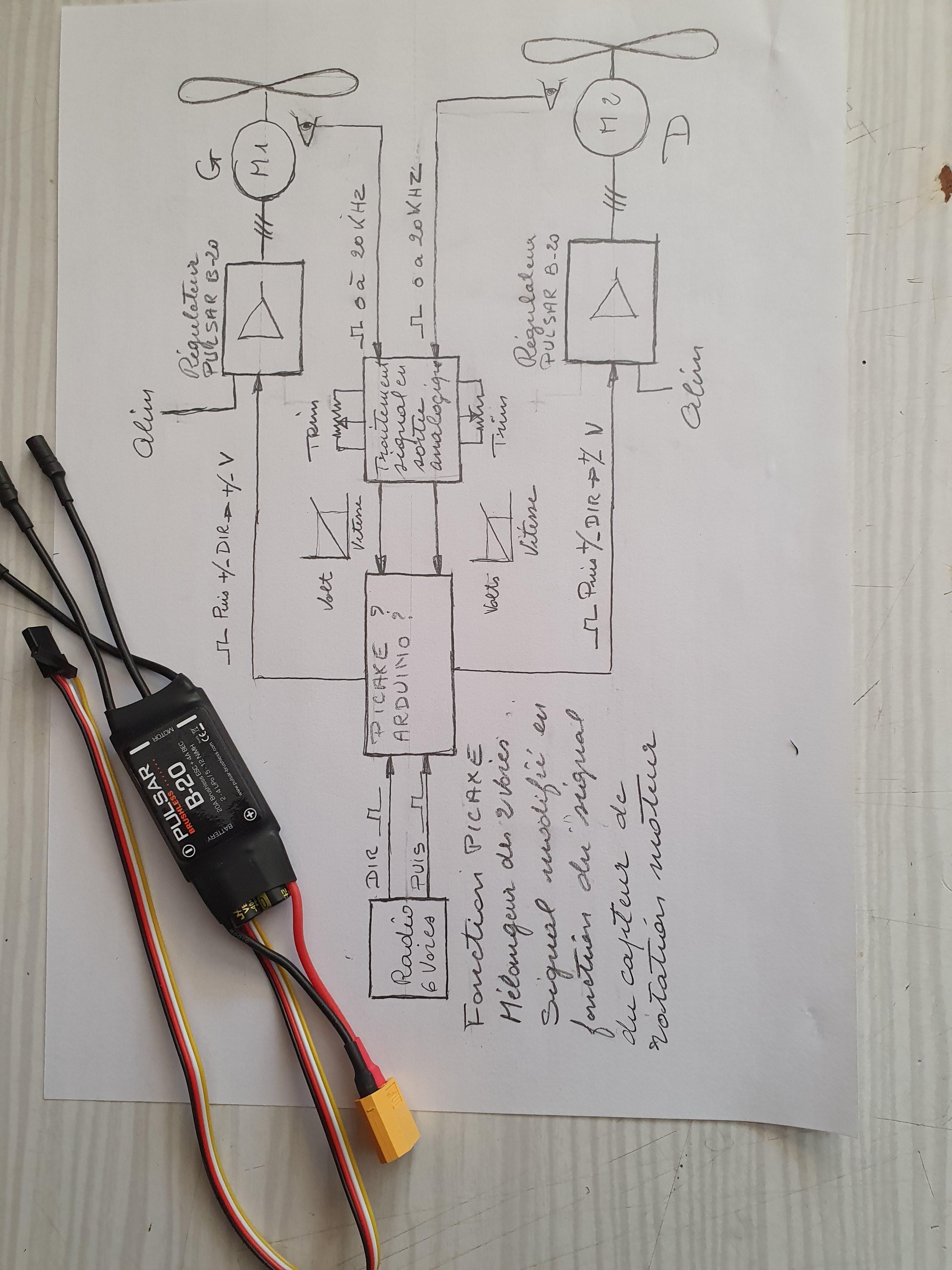
Voici le schéma
J'ai également recherché les programmes de robot pour voir si quelque chose pouvait s'adapter !! ?? peut-être mais où!!
Le principe, deux capteurs mesurent la vitesse des hélices, le signal est traduit en Volts, analogique, envoyé dans le micro contrôleur, celui ci en fonction du programme modifie la valeur PWM s'il n'est pas dans la bonne valeur
Je vais faire un montage test avec Arduino mais le problème est la programmation que je ne connais pas, dur dur !
Merci à celui qui a du temps à me consacrer
Clt
Le savoir des uns peut faire le bonheur des autres
Bonjour,
Je ne connais pas l'arduino, mais il y a plein de sites sur le sujet.
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Ah bien content de te revoir, je ne te voyais plus sur le forum !!c'est pour cela que je me tournais vers Arduino ! (Tu vas dire que je parle que par intérêt, non, mais à nos âges un rien nous arrête)
Penses tu qu'avec un Picaxe on arriverait à un résultat ?
Merci
Le savoir des uns peut faire le bonheur des autres
Salut,
Pendant la nuit mon IN a fonctionné et résultat, mon système ne fonctionne pas, ça se mord la queue, j'explique, si un moteur tourne moins vite, il va envoyer plus de courant, normal c'est le but du jeu, si je veux tourner d'un coté ou de l'autre, je vais devoir ralentir un moteur, il ne comprendra pas que c'est volontaire et compensera en tension ! donc tout droit ! Zut !
Re papier, crayon, gomme !!
Le savoir des uns peut faire le bonheur des autres
Bonjour,
L'IN a parfois du bon et beaucoup plus économe en énergie, on parle maintenant de centrales nucléaires juste pour alimenter les data centers....
MM
Dernière modification par mag1 ; 26/08/2025 à 09h54.
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
bonjour
si je peux me permettre : ce type de probleme n'a de solution logicielle fiable qu'en assembleur quelque soit le µC choisi!
JR
l'électronique c'est pas du vaudou!
Oui, au niveau de la µS, les codes, interprétés qui plus est, ne peuvent rien. Il faut continuer à creuser du côté des sites de modélismes, qui comprendront mieux le problème, en particulier de chercher à synchroniser des moteurs à moins de 250µS (voir #127). Avec la démarche actuelle "picaxe", c'est impossible.
MM
Si il y a des erreurs ci dessus, c'est que je n'ai pas eu le temps de les corriger...
Salut,
Permets toi !! la solution logicielle en assembleur !!?? Heu !!oui !! c' est pour moi de l'asiatique !!si je peux me permettre : ce type de probleme n'a de solution logicielle fiable qu'en assembleur quelque soit le µC choisi!
JR
Je poursuis mes recherches, je n'ai pas épuisé toutes mes idées et puis si je ne trouve pas, pas important, j'aurais appris !
Le savoir des uns peut faire le bonheur des autres
Re
il suffit de s'y mettre, au début c'est ingrat voire pénible mais ensuite tu feras tout ce que tu voudras.
Mais pour ton probleme, quelque soit la solution choisie , assembleur ou interpreté, il faudra te farcir les bases de la régulation PID.
bon courage.
JR
l'électronique c'est pas du vaudou!
Salut,
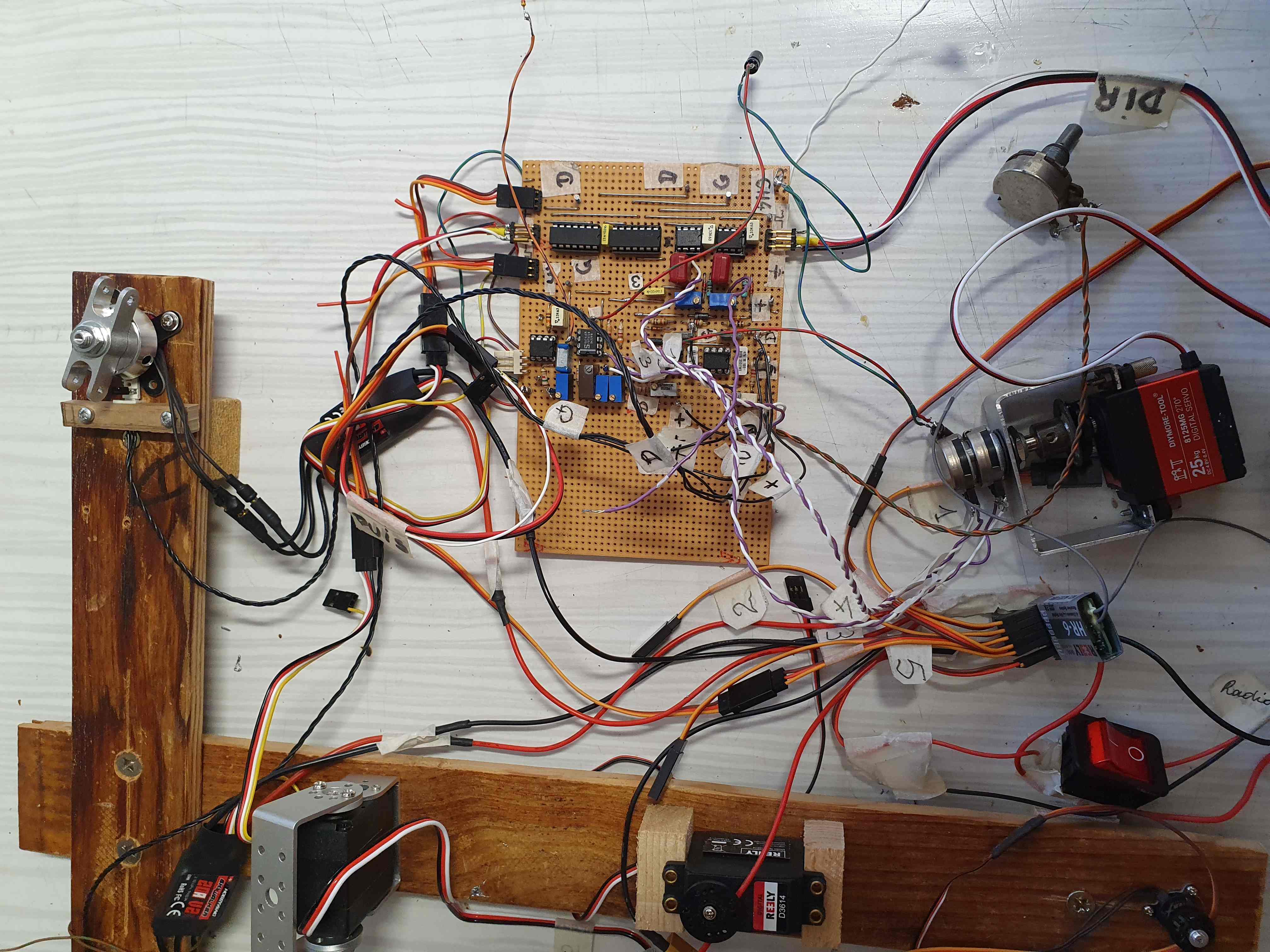
Après une multitude de montages avec plus ou moins de réussite, voici un résumé de ce qui fonctionnerait le mieux si je n'avais pas un problème de redressement du signal venant du système optique
20251005_144613.jpg
La comparaison est rendue difficile à cause des légères fluctuations d'où mauvais fonctionnement du comparateur
J'ai essayé plusieurs montages dont le 358, c'est mieux mais pas parfait, il me faut des tensions continue correctes
20251005_144707.jpg
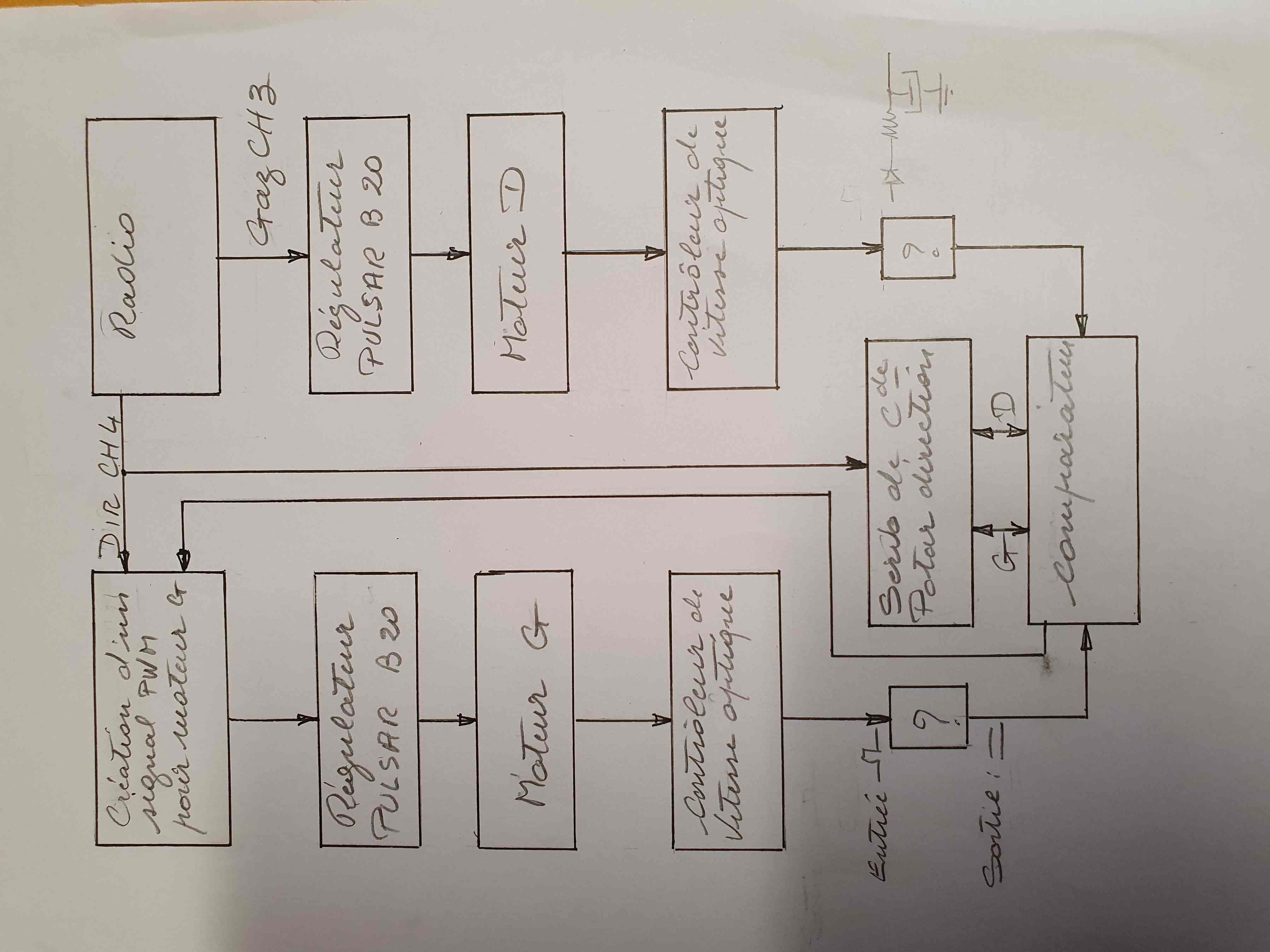
J'ai donc deux questions
1- Connaissez vous une solution pour ce redressement ?
2- Cette réalisation en composants classiques , Avec Picaxe serait elle faisable ? Là c'est hors mes capacités !!
20251005_145120.jpg
Merci pour vos conseils
Le savoir des uns peut faire le bonheur des autres
Quelles sont les fluctuations ? overshhoot dans le pwm ? parasites au-delà des tensions d'alim ? parasites pendant le niveau haut et/ou le niveau bas ?
Y'a du assembly dans l'air, t'y couperas pas
L'électronique c'est comme le violon. Soit on joue juste, soit on joue tzigane . . .
Bonjour
vu la photo https://forums.futura-sciences.com/a...005_144613.jpg, si le capteur de rotation sort 1 top par tour, c'est insuffisant pour avoir un signal stable..
Ce serait mieux avec un disque, au moins 10 secteurs
Pascal
bonjour,
recuperer la roue et le capteur d'une molette de souris.
JR
l'électronique c'est pas du vaudou!
de souris à boule... y'en a plus (heureusement!)
Positron1 peut aussi faire plusieurs trous dans l'axe, une dizaine..
Dernière modification par Pascal071 ; 06/10/2025 à 15h05.
Pascal
re
non d'une souris normale j'ai écrit molette, le truc situé entre les deux cliqueurs!
pour l'avoir fait je sais que cela fonctionne!
JR
l'électronique c'est pas du vaudou!
Salut,
Merci les gars pour vos réponses
Peux tu développer ?, je ne comprends pas !Y'a du assembly dans l'air, t'y couperas pas
Augmenter le nombre de trous , pas de soucis, mais ça ne résoudra pas mon problème, ça ne me déplacera que le rapport nombre de tour / fréquenceCe serait mieux avec un disque, au moins 10 secteurs
J'ai testé avec plusieurs filtres, ça améliore mais ça augmente le temps de réponse, et oui, avec le nombre de condo !!
Il existe un circuit PCF 8591 qui est un convertisseur mais fera t il l'affaire ?, à savoir, la tension continue de sortie augmente t elle en fonction de la vitesse des signaux ? je ne connais pas ce CI
https://uelectronics.com/wp-content/...-Datasheet.pdf
Arduino a un convertisseur A / D mais je suppose qu'il faut un bout de programme ?
C'est ballot car je croyais tenir le bon bout !!
Le savoir des uns peut faire le bonheur des autres
augmenter le nb de top/tour va diminuer la ronflette en sortie du filtre et donc augmenter la réactivité.
Pascal
re
normalement avec un capteur à fourche ou équivalent ce qui sort ce sont des impulsions en niveaux logiques qu'il faut compter, donc on fait un fréquencemètre basique qui n'a pas besoin d'ADC, par contre il faudra passer par de l'assembleur si l'on veut du propre.
Aller jette toi dans le grand bain!
augmenter le nombre d'impulsions permet une mesure plus sensible.
JR
l'électronique c'est pas du vaudou!
Re,
Plus on augmente la fréquence moins on diminue la sensibilité, je pense ! 0 à 20 k hertz est plus facile à mesurer, non ?augmenter le nb de top/tour va diminuer la ronflette en sortie du filtre et donc augmenter la réactivité.
Ah tu y tiens !!!Aller jette toi dans le grand bain!t'aurais pas un schéma par hasard ? !
Pas sot ! Je vais voir de ce coté làon fait un fréquencemètre basique qui n'a pas besoin d'ADC, par contre il faudra passer par de l'assembleur si l'on veut du propre.
Le savoir des uns peut faire le bonheur des autres
0 à 20kHz, avec 1 top par tour, tu as donc des moteurs qui tournent à 1.200.000 t/mn ?
la fraise pneumatique de mon dentiste tourne 10 fois moins vite..
jiherve: la molette du milieu, j'avais pas percuté !
pour 10.000 t/mn:
avec 1 top/tour ça fait 166Hz, il faut un filtre 8Hz pour bien lisser (1/20)
8Hz font 125mS, c'est trop lent comme réactivité.
avec 10 top/tour, 1660Hz, filtre 80Hz, 12,5mS de réactivité
je n'ai peut être pas employé les bons thermes, mais c'est pour expliquer..
Pascal


{kind=link}
{kind=link}
{kind=link}