

Bonjour, jai commencé un projet en électronique/conception/programmation dans mon temps libre, je préviens que je nai seulement que des connaissances que jai appris suite à mes projets alors je demande des avis experts pour cela !
Je fabrique un Hexapode 3 DOF (trois axe de liberté) et pour ce projet jutilise des servos DS3235 qui peuvent tirer ~2,3A en peak chacun, alors même si ce nest que lorsquils forcent et ils ne forcent jamais tous en même temps, mais nempêche que en moyenne le circuit vois presque 10-15A (total de 18 servos). Le problème est que lorsque je le démarre et fais fonctionner les servos, la tension de ma batterie NiMh 5S (6V nominal) 5800mAh chute, jusquà 0,4-0,6 volts de perte.
Donc je ne sais même pas si cela est très grave mais du coup je marrête toujours avant la limite de décharge pour éviter de descendre la batterie trop bas. Mais du coup est ce que cela est vraiment problématique et comment éviter ce problème au maximum.
Sils vous faut des informations supplémentaires nhésitez pas.
Merci beaucoup à ceux qui massisterons !
-----





 ) dont voici le lien :
) dont voici le lien :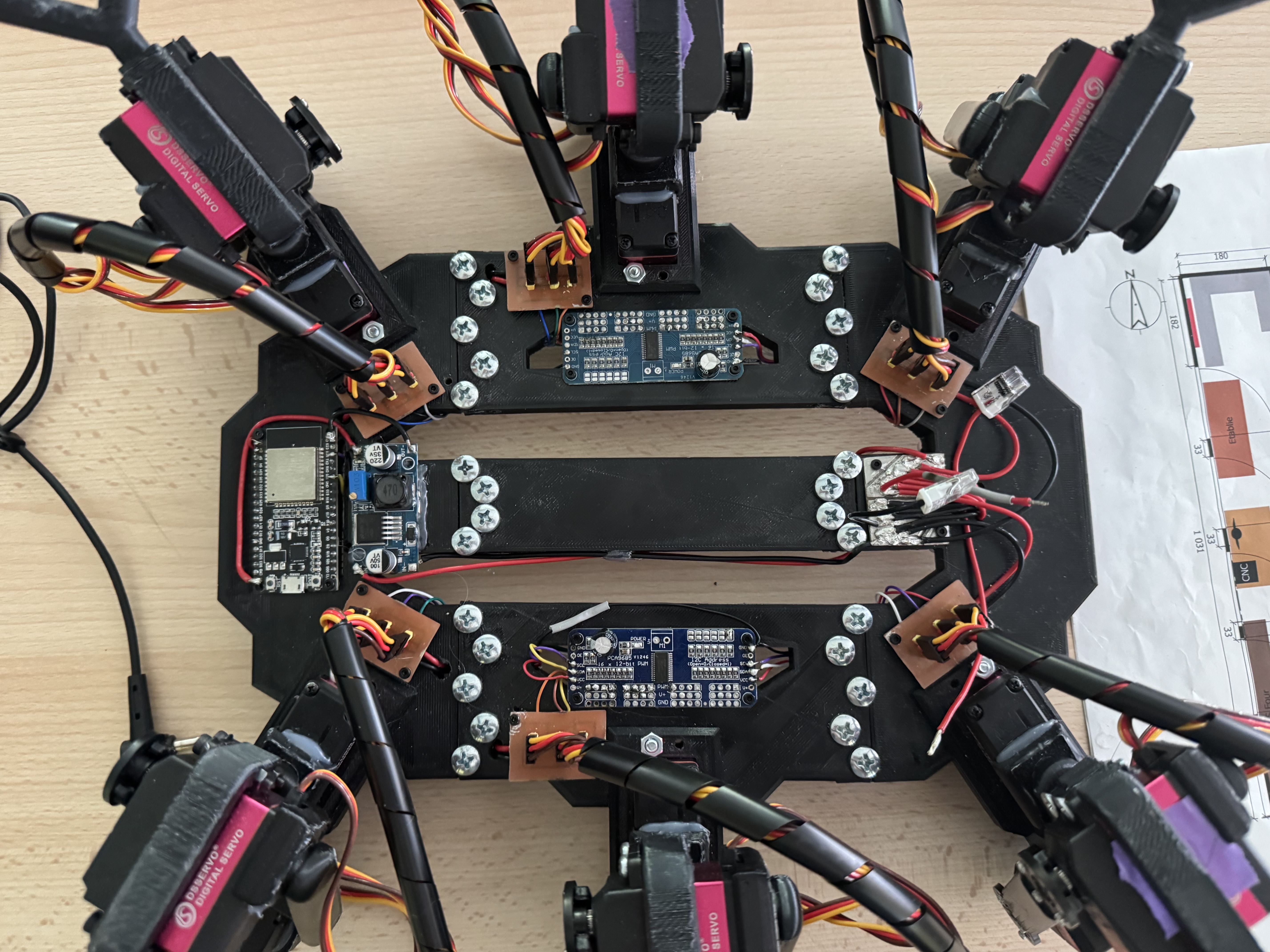{kind=link}
{kind=link}