


Bonjour à tous,
J'ai actuellement un problème de géométrie, je n'arrive pas à trouver les angles qu'il me faut et même si j'ai l'impression que la solution est toute bête je n'arrive pas à la trouver alors j'espère que vous pourrez m'aider.
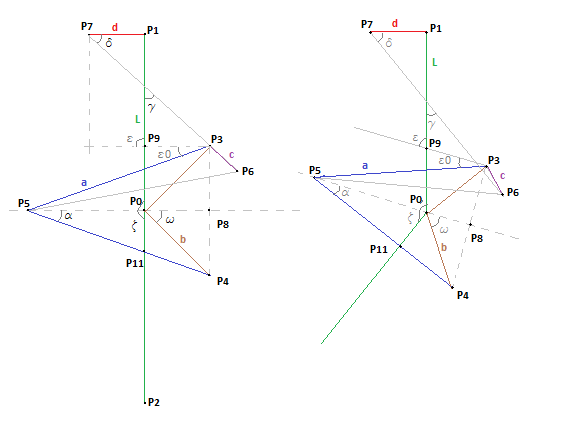
Voici la géométrie, les longueurs et angles fixes sont les suivant :
L = P0P1 = P0P2
a = P5P3 = P5P4
b = P0P4 = P0P3
c = P3P6
d = P1P7
l'angle epsilon0 = angle(P5P3P9) qui est défini pour dzeta = 180° , donc pour dzeta < 180° on aura toujours epsilon0(dzeta<180°) = epsilon0(dzeta=180°)
l'angle (P5P3P6) qui est défini pour dzeta = 180°, idem que pour epsilon0, on a angle(P5P3P6)(dzeta<180°) = angle(P5P3P6)(dzeta = 180°)
Et on connait aussi l'angle dzeta
Ce que l'on cherche c'est à déterminer tous les autres angles, alpha, omega, epsilon, gamma et delta en fonction des données si dessus.
On sait que :
[P5P0] est la bissectrice de l'angle 2*alpha
[P5P0] est la bissectrice de l'angle dzeta
[P5P0] est la bissectrice de l'angle 2*omega
angle(P0P8P3) = 90°
lorsque dzeta = 180° on a epsilon = 90° et omega = 45°
[P7P6] est confondu avec [P7P3] et [P3P6] lorsque dzeta = 180° mais ce n'est plus le cas lorsque dzeta < 180°
si vous souhaitez d'autres explications ou d'autres données qui vous manqueraient pour y arriver, n'hésitez pas à me demander.
Merci d'avance de l'aide que vous pourrez m'apporter.
Le but de cet exercice est de pouvoir reconstituer toute la figure pour chaque dzeta donné. Il me faut donc les coordonnées de chaque point en considérant que P0 est le centre du repère et que nous avons un repère orthonormé direct. Cela me permettra au final de programmer le système en Matlab pour qu'en donnant dzeta j'ai directement la géométrie correct.
Fonia
-----